本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第32章 DS18B20温度获取实验
本章目标
- 了解DS18B20通信协议;
- 学会使用RA6M5驱动DS18B20以获取温度数据;
32.1 DS18B20简介
DS18B20温度传感器具有线路简单、体积小的特点,用来测量温度非常简单,在一根通信线上可以挂载多个DS18B20温度传感器。用户可以通过编程实现9~12位的温度读数,每个DS18B20有唯一的64位序列号,保存在rom中,因此一条总线上可以挂载多个DS18B20。
温度寄存器格式如下表所示:
| Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | |
|---|---|---|---|---|---|---|---|---|
| LS Byte |  |  |  |  |  |  |  |  |
| MS Byte | S | S | S | S | S |  |  |  |
32.1.1 单总线连接
主控芯片和DS18B20之间,只需要连接两条线:数据线、GND。除去GND,只有一条数据线,这就是单总线。
要使用一条数据线传输双向的数据,要考虑最坏的情况:如果双方同时驱动这个数据线时,一个输出高电平,一个输出低电平,会不会烧坏?所以,一般来说,单总线的驱动电路都是漏极开路,并且使用上拉电阻。如下图所示:
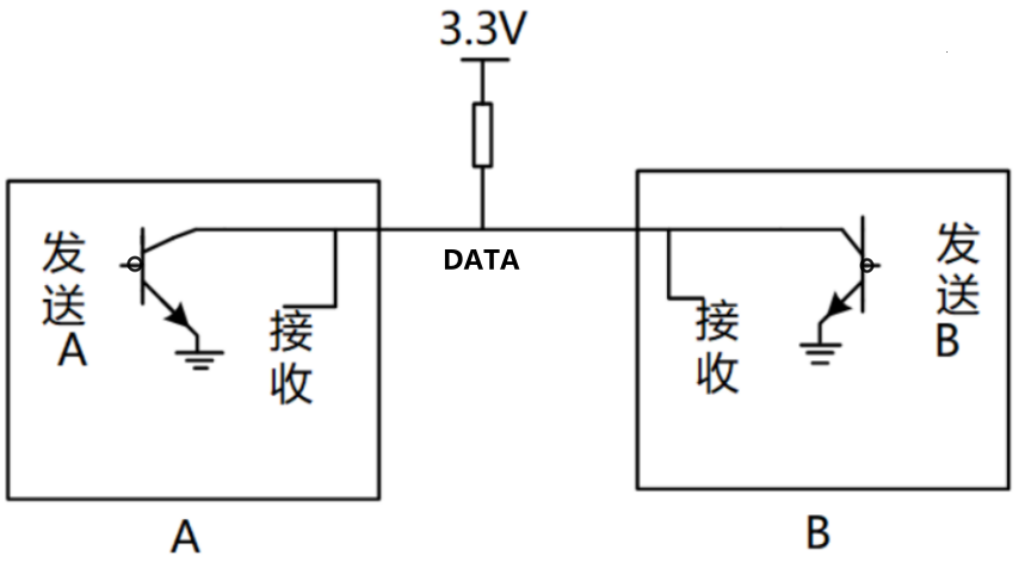
A、 B的输出值与DATA信号的关系,如下表所示:
| A | B | DATA |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |
即:DATA = A & B,只要一方输出0,DATA就是0。
使用单总线可以连接很多DS18B20,它们平时处于高阻态(内部输出1,反相后无法驱动三极管),不影响其他设备。参与通信的DS18B20,想输出0时并不会损坏其他设备。
DS18B20接口如下:

32.1.2 内部存储器
DS18B20内部有个64位只读存储器(ROM)和64位配置存储器(SCRATCHP)。
64位只读存储器(ROM)包含序列号等,具体格式如下图:
低八位用于CRC校验,中间48位是DS18B20唯一序列号,高八位是该系列产品系列号(固定为28h)。因此,根据每个DS18B20唯一的序列号,可以实现一条总线上可以挂载多个DS18B20时,获取指定DS18B20的温度信息。
64位配置存储器(SCRATCHP)由9个Byte组成,包含温度数据、配置信息等,具体格式如下图:
Byte[0:1]:温度值。也就是当我们发出一个测量温度的命令之后,还需要发送一个读内存的命令才能把温度值读取出来。
Byte[2:3]:TL是低温阈值设置,TH是高温阈值设置。当温度低于/超过阈值,就会报警。 TL、TH存储在EEPROM中,数据在掉电时不会丢失;
Byte4:配置寄存器。用于配置温度精度为9、10、11或12位。配置寄存器也存储在EEPROM中,数据在掉电时不会丢失;
Byte[5:7]:厂商预留;
Byte[8]:CRC校验码。
32.1.3 通信时序
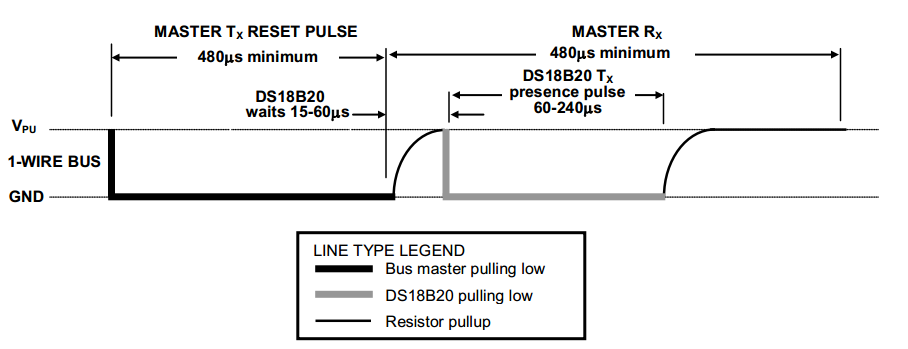
① 初始化时序
主机要跟DS18B20通信,首先需要发出一个开始信号。下图中,深黑色线表示由主机驱动信号,浅灰色线表示由DS18B20驱动信号。最开始时引脚是高电平,想要开始传输信号,步骤如下:
a. 主机必须要拉低至少480us,这是复位信号;
b. 然后主机释放总线,等待15~60us之后,
c. 如果GPIO上连有DS18B20芯片,它会拉低60~240us。
如果主机在最后检查到60~240us的低脉冲,则表示DS18B20初始化成功。
② 写时序
如果写0,拉低至少60us(写周期为60-120us)即可;
如果写1,先拉低至少1us,然后拉高,整个写周期至少为60us即可。
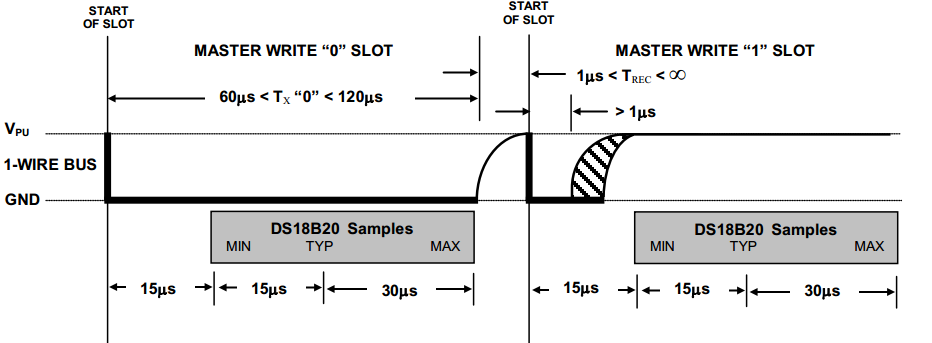
③ 读时序
主机先拉低至少1us,随后读取电平,如果为0,即读到的数据是0,如果为1,即可读到的数据是1。
整个过程必须在15us内完成,15us后引脚都会被拉高。

32.1.4 常用命令
现在我们知道怎么发1位数据,收1位数据。发什么数据才能得到温度值,这需要用到“命令”。
DS18B20中有两类命令:ROM命令、功能命令,列表如下:


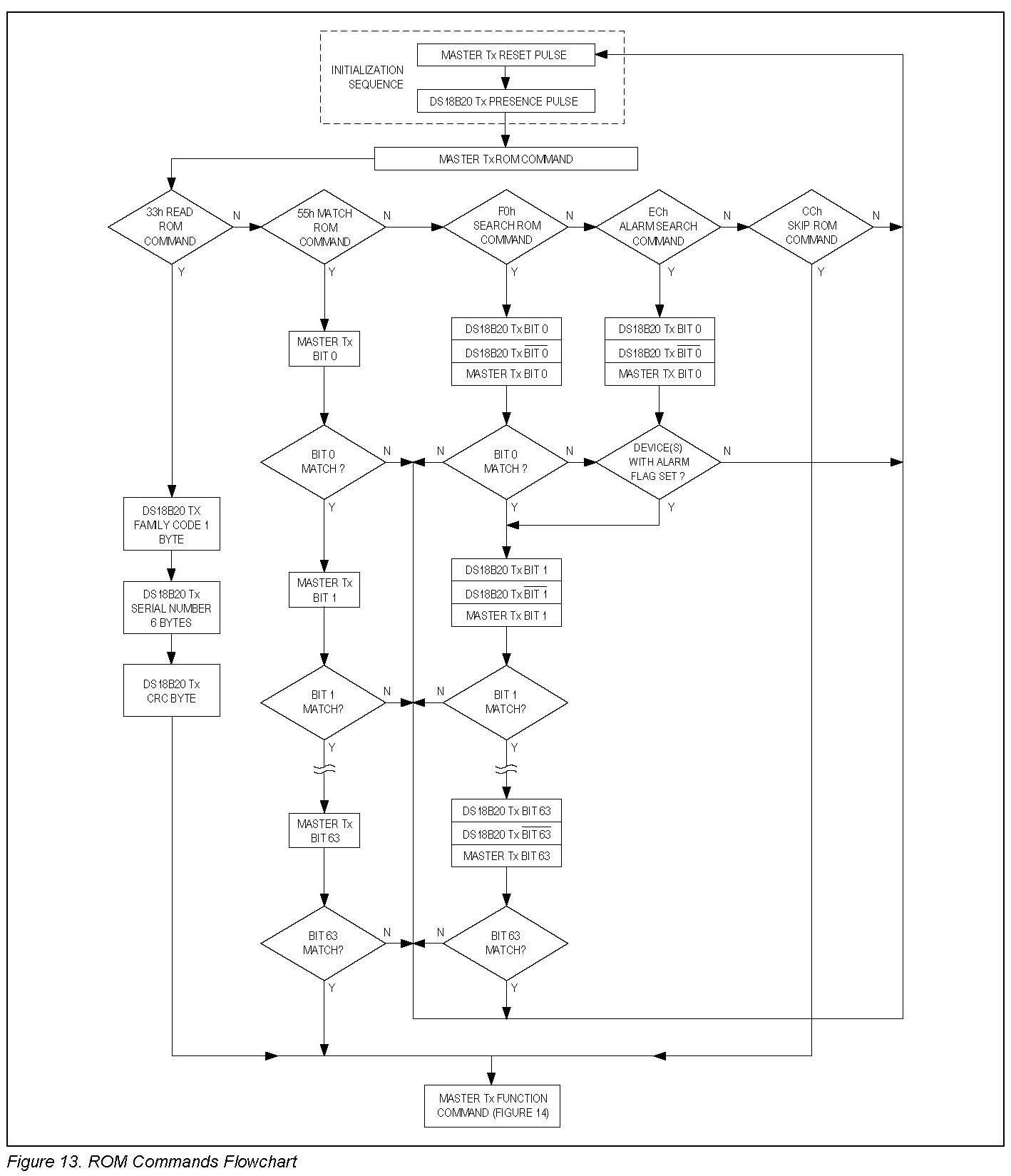
32.1.5 流程图
DS18B20芯片手册中有ROM命令、功能命令的流程图,先贴出来,下一小节再举例。
ROM命令流程图如下:
功能命令流程图如下:

32.1.6 操作示例1:单个DS18B20温度转换
总线上只一个DS18B20设备时,根据下表发送命令、读取数据。因为只有一个DS18B20,所以不需要选择设备,发出“Skip ROM”命令。然后发户“Convert T”命令启动温度转换;等待温度转换成功后再读数据。读数据前,也要发出“Skip ROM”命令。
下表列得很清楚:
| 主机模式 | 数据 | 描述 |
|---|---|---|
| 发送 | 复位 | 主机发出复位脉冲 |
| 接收 | 回应 | 总线上可能有多个DS18B20,它们都可以拉低信号,回应 |
| 发送 | CCh | 主机发出“Skip ROM”命令(忽略ROM) |
| 发送 | 44h | 主机发出“Convert T”命令(启动温度转换) |
| 发送 | 保持高电平 | 主机使用强上拉保存数据线为高电平,至少tCONV() |
| 发送 | 复位 | 主机发出复位脉冲 |
| 接收 | 回应 | 总线上可能有多个DS18B20,它们都可以拉低信号,回应 |
| 发送 | CCh | 主机发出“Skip ROM”命令(忽略ROM) |
| 发送 | BEh | 主机发出“Read Scratchpad”命令(读内存) |
| 接收 | 9字节数据 | 主机读9字节数据 |
32.1.7 操作示例2:指定DS18B20温度转换
总线上有多个DS18B20设备时,根据下表发送命令、读取数据。首先是要选中指定设备:使用“Match ROM”命令发出ROM Code来选择中设备;然后发出“Convert T”命令启动温度转换;等待温度转换成功后读数据。读数据前,也要发出“Match ROM”命令、ROM Code。
下表列得很清楚:
| 主机模式 | 数据 | 描述 |
|---|---|---|
| 发送 | 复位 | 主机发出复位脉冲 |
| 接收 | 回应 | 总线上可能有多个DS18B20,它们都可以拉低信号,回应 |
| 发送 | 55h | 主机发出“Match ROM”命令(匹配ROM) |
| 发送 | 64位ROM code | 主机发出想访问的DS18B20的“ROM Code” |
| 发送 | 44h | 主机发出“Convert T”命令(启动温度转换) |
| 发送 | 保持高电平 | 主机使用强上拉保存数据线为高电平,至少tCONV() |
| 发送 | 复位 | 主机发出复位脉冲 |
| 接收 | 回应 | 总线上可能有多个DS18B20,它们都可以拉低信号,回应 |
| 发送 | 55h | 主机发出“Match ROM”命令(匹配ROM) |
| 发送 | 64位ROM code | 主机发出想访问的DS18B20的“ROM Code” |
| 发送 | BEh | 主机发出“Read Scratchpad”命令(读内存) |
| 接收 | 9字节数据 | 主机读9字节数据 |
32.2 模块配置
DS18B20所用引脚要配置为开漏输出,还要使用一个GPT定时器实现微妙的延时。
32.2.1 GPIO配置
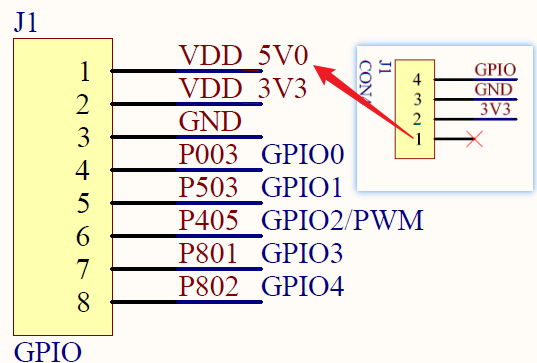
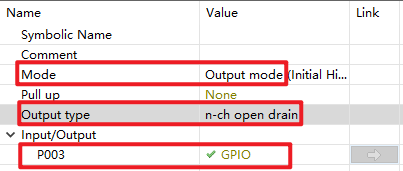
本次实验使用的DS18B20为扩展模块,接插到开发板的扩展板上。使用引脚P003作为DS18B20的DQ功能引脚,原理图如下图所示:
根据DS18B20手册的描述,DQ引脚应该被设置为开漏输出,因而在RASC中如下配置:
32.2.2 GPT配置
本次实验需要比较精确的微妙级别的延时,因而使用了一个GPT定时器来实现延时函数,GPT配置如下图所示;

32.3 延时函数模块封装
为了满足更多的需求,将延时函数封装为一个独立的模块,实现秒级、毫秒级和微秒级的延时函数。这些延时函数对于不同的平台,不同的RTOS,内部实现的办法会有所不同。
基于瑞萨处理器RA6M5平台,这些延时函数使用定时器设备的Timeout函数实现,代码如下:
void delay(unsigned long secs)
{
struct TimerDev *pTimer = TimerDeviceFind("Delay Timer");
pTimer->Timeout(pTimer, secs*1000*1000);
}
void mdelay(unsigned long msecs)
{
struct TimerDev *pTimer = TimerDeviceFind("Delay Timer");
pTimer->Timeout(pTimer, msecs*1000);
}
void udelay(unsigned long usecs)
{
struct TimerDev *pTimer = TimerDeviceFind("Delay Timer");
pTimer->Timeout(pTimer, usecs);
}
要想使用上述函数,要在config.h中定义如下宏开关:
/* Libraries Enable/Disable */
#define LIBS_USE_DELAY 1
32.4 驱动程序
32.4.1 GPIO驱动
GPIO驱动程序就是对引脚进行初始化和读写。
-
初始化GPIO
static int IODrvInit(struct IODev *ptdev) { if(ptdev == NULL) return -EINVAL; if(ptdev->name == NULL) return -EINVAL; fsp_err_t err = g_ioport.p_api->open(g_ioport.p_ctrl, g_ioport.p_cfg); assert(FSP_SUCCESS == err); return ESUCCESS; } -
输出电平
static int IODrvWrite(struct IODev *ptdev, unsigned char level) { if(ptdev == NULL) return -EINVAL; if(ptdev->name == NULL) return -EINVAL; fsp_err_t err = g_ioport.p_api->pinCfg(g_ioport.p_ctrl, ptdev->port, IOPORT_CFG_PORT_DIRECTION_OUTPUT); assert(FSP_SUCCESS == err); err = g_ioport.p_api->pinWrite(g_ioport.p_ctrl, ptdev->port, (bsp_io_level_t)level); assert(FSP_SUCCESS == err); return ESUCCESS; }
- 第06行:将IO重新配置为输出模式;
-
读取电平
static int IODrvRead(struct IODev *ptdev) { if(ptdev == NULL) return -EINVAL; if(ptdev->name == NULL) return -EINVAL; fsp_err_t err = g_ioport.p_api->pinCfg(g_ioport.p_ctrl, ptdev->port, IOPORT_CFG_PORT_DIRECTION_INPUT); assert(FSP_SUCCESS == err); err = g_ioport.p_api->pinRead(g_ioport.p_ctrl, ptdev->port, (bsp_io_level_t*)&ptdev->value); assert(FSP_SUCCESS == err); return ESUCCESS; }
- 第06行:将IO重新配置为输入模式;
32.4.2 定时器驱动
本节只展现GPT关键的代码,至于其它部分代码请读者自行参考前面章节。
-
初始化GPT
static int GPTDrvInit(struct TimerDev *ptdev) { if(NULL==ptdev) return -EINVAL; switch(ptdev->channel) { case 0: { /* 打开GPT设备完成初始化 */ fsp_err_t err = g_timer0.p_api->open(g_timer0.p_ctrl, g_timer0.p_cfg); assert(FSP_SUCCESS == err); break; } case 1:case 2:case 3: case 4:case 5:case 6: case 7:case 8:case 9: break; default:break; } return ESUCCESS; } -
GPT Timeout
static int GPTDrvTimeout(struct TimerDev *ptdev, unsigned int timeout)
{
if(NULL == ptdev) return -EINVAL;
if(0 == timeout) return -EINVAL;
switch(ptdev->channel)
{
case 0:
{
fsp_err_t err = g_timer0.p_api->periodSet(g_timer0.p_ctrl, timeout*100);
assert(FSP_SUCCESS == err);
err = g_timer0.p_api->reset(g_timer0.p_ctrl);
assert(FSP_SUCCESS == err);
err = g_timer0.p_api->start(g_timer0.p_ctrl);
assert(FSP_SUCCESS == err);
GPTDrvWaitTimer0Overflow();
break;
}
case 1:case 2:case 3:
case 4:case 5:case 6:
case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
32.5 DS18B20模块
32.5.1 DS18B20设备对象
要操作DS18B20,只需要对它进行初始化、然后读取数值(在读函数中封装了启动温度转换的操作)。抽象出如下结构体:
typedef struct DS18B20Dev{
float value;
int (*Init)(struct DS18B20Dev *ptdev);
int (*Read)(struct DS18B20Dev *ptdev);
}DS18B20Device;
在Read函数中会发出各类指令,根据这些指令定义一个枚举类型:
typedef enum
{
READ_ROM = 0x33,
MATCH_ROM = 0x55,
SEARCH_ROM = 0xF0,
ALARM_SEARCH = 0xEC,
SKIP_ROM = 0xCC,
WRITE_SCRATCHPAD = 0x4E,
READ_SCRATCHPAD = 0xBE,
COPY_SCRATCHPAD = 0x48,
CONVERT_T = 0x44,
RECALL_E2 = 0xB8,
READ_POWER_SUPPLY = 0xB4,
}DS18B20_CMD;
最后需要向上层应用提供获取DS18B20设备的接口:
struct DS18B20Dev *DS18B20GetDevice(void)
{
return &gDevice;
}
32.5.2 初始化设备
DS18B20本身不需要进行什么初始化,只需要初始化使用到的IO即可:
static int DS18B20DevInit(struct DS18B20Dev *ptdev)
{
if(NULL == ptdev) return -EINVAL;
gDQDevice = IODeviceFind("DS18B20 DQ");
if(NULL == gDQDevice)
{
printf("Failed to find DS18B20 DQ!\r\n");
return -ENXIO;
}
if(ESUCCESS != gDQDevice->Init(gDQDevice))
{
printf("Failed to init GPIO!\r\n");
return -EIO;
}
return ESUCCESS;
}
32.5.3 DS18B20发送一个字节数据
根据DS18B20通信时序,实现发送一个字节的函数:
static void DS18B20DevWriteByte(unsigned char cmd)
{
for(unsigned char i=0; i<8; i++)
{
if((cmd&0x01)==0x01) // 写1
{
gDQDevice->Write(gDQDevice, 0);
udelay(10); // 低电平维持10us
gDQDevice->Write(gDQDevice, 1);
udelay(100); // 高电平维持100us, 总时长110us
}
else // 写0
{
gDQDevice->Write(gDQDevice, 0);
udelay(100); // 低电平维持50us
gDQDevice->Write(gDQDevice, 1);
udelay(10); // 高电平维持50us, 总时长100us
}
cmd = cmd>>1;
}
}
32.5.4 DS18B20接收一个字节数据
基于开漏输出的特点,主控想放弃单总线的控制时,要让它输出1;然后才可以读取数据。代码如下:
static unsigned char DS18B20DevReadByte(void)
{
unsigned char tmp = 0;
unsigned char time_out = 100;
for(unsigned char i=0; i<8; i++)
{
gDQDevice->Write(gDQDevice, 1);
gDQDevice->Read(gDQDevice);
if(gDQDevice->value==0)
{
tmp = (tmp>>1);
gDQDevice->Read(gDQDevice);
while((gDQDevice->value==0) && (time_out!=0))
{
udelay(1);
gDQDevice->Read(gDQDevice);
time_out--;
}
if(time_out==0) return 0xFF;
udelay(10);
}
else
{
tmp = (tmp>>1)|0x80;
udelay(100);
}
}
return tmp;
}
- 第08行:处理器将IO输出寄存器写1放弃总线控制权;
32.5.5 DS18B20复位
- 主控发出初始化时序
代码如下:
static void DS18B20DevResetPulse(void)
{
if(NULL == gDQDevice) return;
gDQDevice->Write(gDQDevice, 1);
udelay(10);
gDQDevice->Write(gDQDevice, 0); // 主机拉低480us~960us
udelay(480);
gDQDevice->Write(gDQDevice, 1); // 主机拉高10us
udelay(10);
}
第05、09行的代码让GPIO输出1,但是基于开漏电路的特点,它是依靠上拉电阻将总线拉高。
- 主控等待DS18B20发出回应脉冲
当主机发出复位脉冲且放弃总线控制后,只需要去读取IO电平并判断时延即可:
static int DS18B20DevWaitPresencePulse(void)
{
if(NULL == gDQDevice) return -EINVAL;
unsigned int time_out = 100;
time_out = 100;
gDQDevice->Read(gDQDevice);
while((gDQDevice->value==1) && (time_out!=0))
{
// 等待DS18B20将总线拉低
gDQDevice->Read(gDQDevice);
udelay(1);
time_out--;
}
if(time_out==0) return -EIO;
time_out = 100;
gDQDevice->Read(gDQDevice);
while((gDQDevice->value==0) && (time_out!=0))
{
gDQDevice->Read(gDQDevice);
udelay(1);
time_out--;
}
if(time_out==0) return -EIO;
return ESUCCESS;
}
- 复位函数
综合前两个函数即为复位函数:
static int DS18B20DevReset(void)
{
DS18B20DevResetPulse();
if(DS18B20DevWaitPresencePulse() == EIO)
{
return -EIO; // 等待应答超时
}
return ESUCCESS;
}
32.5.6 读取DS18B20温度数据
根据前面的操作示例1,编写读取函数,代码如下:
static int DS18B20DevRead(struct DS18B20Dev *ptdev)
{
if(NULL == ptdev) return -EINVAL;
unsigned char ret1 = 0, ret2 = 0;
unsigned short ret = 0;
if(ESUCCESS != DS18B20DevReset())
{
return -EIO;
}
DS18B20DevWriteByte(SKIP_ROM); // 0xCC
DS18B20DevWriteByte(CONVERT_T); // 0x44
if(ESUCCESS != DS18B20DevReset())
{
return -EIO;
}
DS18B20DevWriteByte(SKIP_ROM); // 0xCC
DS18B20DevWriteByte(READ_SCRATCHPAD); // 0xBE
ret1 = DS18B20DevReadByte();
ret2 = DS18B20DevReadByte();
ret = (unsigned short)((ret2<<8) | ret1);
float mTempture_inter = 0, mTempture_dec = 0, mTempture = 0;
mTempture_dec = (float)((ret&0xFF)*0.0625);
mTempture_inter = (ret>>4)&0x7F;
mTempture = mTempture_inter + mTempture_dec;
if(((ret>>12)&0xF)==0xF)
{
mTempture = -mTempture;
}
ptdev->value = mTempture;
return ESUCCESS;
}
32.6 测试程序
测试程序比较简单,获取DS18B20设备并成功初始化之后,直接读取即可。本实验每隔2s读取一次数据并打印观察:
void DeviceTest(void)
{
UartDevicesRegister();
TimerDevicesRegister();
IODevicesRegister();
DS18B20Device *pDevice = DS18B20GetDevice();
if(NULL == pDevice)
{
printf("Error. There is no DS18B20 device!\r\n");
return;
}
pDevice->Init(pDevice);
printf("\r\n");
while(1)
{
if(pDevice->Read(pDevice) == ESUCCESS)
{
printf("环境温度:%.4f℃ \r", pDevice->value);
}
delay(2);
}
}
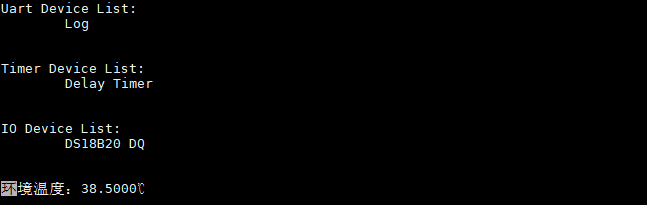
32.7 测试结果
将程序编译烧录到开发板中运行可以观察到如下图所示的测试结果: