本文属于「征服LeetCode」系列文章之一,这一系列正式开始于2021/08/12。由于LeetCode上部分题目有锁,本系列将至少持续到刷完所有无锁题之日为止;由于LeetCode还在不断地创建新题,本系列的终止日期可能是永远。在这一系列刷题文章中,我不仅会讲解多种解题思路及其优化,还会用多种编程语言实现题解,涉及到通用解法时更将归纳总结出相应的算法模板。
为了方便在PC上运行调试、分享代码文件,我还建立了相关的仓库。在这一仓库中,你不仅可以看到LeetCode原题链接、题解代码、题解文章链接、同类题目归纳、通用解法总结等,还可以看到原题出现频率和相关企业等重要信息。如果有其他优选题解,还可以一同分享给他人。
由于本系列文章的内容随时可能发生更新变动,欢迎关注和收藏征服LeetCode系列文章目录一文以作备忘。
存在一个由 n 个节点组成的无向连通图,图中的节点按从 0 到 n - 1 编号。
给你一个数组 graph 表示这个图。其中,graph[i] 是一个列表,由所有与节点 i 直接相连的节点组成。
返回能够访问所有节点的最短路径的长度。你可以在任一节点开始和停止,也可以多次重访节点,并且可以重用边。
示例 1:
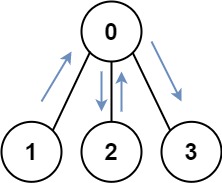
输入:graph = [[1,2,3],[0],[0],[0]]
输出:4
解释:一种可能的路径为 [1,0,2,0,3]
示例 2:
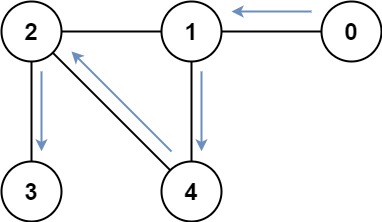
输入:graph = [[1],[0,2,4],[1,3,4],[2],[1,2]]
输出:4
解释:一种可能的路径为 [0,1,4,2,3]
提示:
n == graph.length1 <= n <= 120 <= graph[i].length < ngraph[i]不包含i- 如果
graph[a]包含b,那么graph[b]也包含a - 输入的图总是连通图
解法1 状态压缩 + 广度优先搜索
由于题目需要我们求出「访问所有节点的最短路径的长度」,并且图中每一条边的长度均为 1 1 1 ,因此我们可以考虑使用广度优先搜索的方法求出最短路径。
在常规的广度优先搜索中,我们会在队列中存储节点的编号。对于本题而言,最短路径的前提是「访问了所有节点」,因此除了记录节点的编号以外,我们还需要记录每一个节点的经过情况。因此,我们使用三元组 ( u , m a s k , d i s t ) (u, mask,dist) (u,mask,dist) 表示队列中的每一个元素,其中:
- u u u 表示当前位于的节点编号;
- m a s k mask mask 是一个长度为 n n n 的二进制数,表示每一个节点是否经过。如果 m a s k mask mask 的第 i i i 位是 1 1 1 ,则表示节点 i i i 已经过,否则表示节点 i i i 未经过;
- d i s t dist dist 表示到当前节点为止经过的路径长度。
这样一来,我们使用该三元组进行广度优先搜索,即可解决本题。初始时,我们将所有的 ( i , 2 i , 0 ) (i,2^i,0) (i,2i,0) 放入队列,表示可以从任一节点开始。在搜索的过程中,如果当前三元组中的 m a s k mask mask 包含 n n n 个 1 1 1(即 mask = 2 n − 1 \textit{mask} = 2^n - 1 mask=2n−1 ),那么我们就可以返回 d i s t dist dist 作为答案。
细节:为了保证广度优先搜索时间复杂度的正确性,即同一个节点 u u u 以及节点的经过情况 m a s k mask mask 只被搜索到一次,我们可以使用数组或者哈希表记录 ( u , m a s k ) (u,mask) (u,mask) 是否已经被搜索过,防止无效的重复搜索。
class Solution {
public:
int shortestPathLength(vector<vector<int>>& g) {
int n = g.size();
queue<tuple<int, int, int>> q;
vector<vector<bool>> vis(n, vector<bool>(1 << n)); // [u,mask],避免重复遍历
for (int i = 0; i < n; ++i) {
q.emplace(i, 1 << i, 0);
vis[i][1 << i] = true;
}
int ans = 0;
while (!q.empty()) {
auto [u, mask, dist] = q.front();
q.pop();
if (mask == (1 << n) - 1) {
ans = dist;
break;
}
// 搜索相邻的节点
for (int v : g[u]) {
// 将mask的第v位置1
int maskV = mask | (1 << v);
if (!vis[v][maskV]) {
q.emplace(v, maskV, dist + 1);
vis[v][maskV] = true;
}
}
}
return ans;
}
};
复杂度分析:
- 时间复杂度: O ( n 2 ⋅ 2 n ) O(n^2 \cdot 2^n) O(n2⋅2n) 。常规的广度优先搜索的时间复杂度为 O ( n + m ) O(n+m) O(n+m) ,其中 n n n 和 m m m 分别表示图的节点数和边数。本题中引入了 m a s k mask mask 这一维度,其取值范围为 [ 0 , 2 n ) [0, 2^n) [0,2n) ,因此可以看成是进行了 2 n 2^n 2n 次常规的广度优先搜索。由于 m m m 的范围没有显式给出,在最坏情况下为完全图,有 O ( n 2 ) = m O(n^2)=m O(n2)=m ,因此总时间复杂度为 O ( n 2 ⋅ 2 n ) O(n^2 \cdot 2^n) O(n2⋅2n) 。
- 空间复杂度: O ( n ⋅ 2 n ) O(n \cdot 2^n) O(n⋅2n) ,即为队列需要使用的空间。
解法2 预处理点对间最短路 + 状态压缩动态规划
由于题目中给定的图是连通图,那么我们可以计算出任意两个节点之间 u , v u, v u,v 间的最短距离,记为 d ( u , v ) d(u,v) d(u,v) 。这样一来,我们就可以使用动态规划的方法计算出最短路径。
对于任意一条经过所有节点的路径,它的某一个子序列(可以不连续)一定是 0 , 1 , ⋯ , n − 1 0, 1, \cdots, n - 1 0,1,⋯,n−1 的一个排列。我们称这个子序列上的节点为「关键节点」。在动态规划的过程中,我们也是通过枚举「关键节点」进行状态转移的。
我们用
f
[
u
]
[
mask
]
f[u][\textit{mask}]
f[u][mask] 表示从任一节点开始到节点
u
u
u 为止,并且经过的「关键节点」对应的二进制表示为
m
a
s
k
mask
mask 时的最短路径长度。由于
u
u
u 是最后一个「关键节点」,那么在进行状态转移时,我们可以枚举上一个「关键节点」
v
v
v ,即:
f
[
u
]
[
mask
]
=
min
v
∈
mask
,
v
≠
u
{
f
[
v
]
[
mask
\
u
]
+
d
(
v
,
u
)
}
f[u][\textit{mask}] = \min_{v \in \textit{mask}, v \neq u} \big\{ f[v][\textit{mask}\backslash u] + d(v, u) \big\}
f[u][mask]=v∈mask,v=umin{f[v][mask\u]+d(v,u)}
其中 mask \ u \textit{mask} \backslash u mask\u 表示将 m a s k mask mask 的第 u u u 位从 1 1 1 变为 0 0 0 后的二进制表示。也就是说,「关键节点」 v v v 在 m a s k mask mask 中的对应位置必须为 1 1 1 ,将 f [ v ] [ mask \ u ] f[v][\textit{mask} \backslash u] f[v][mask\u] 加上从 v v v 走到 u u u 的最短路径长度为 d ( v , u ) d(v,u) d(v,u) ,取最小值即为 f [ u ] [ m a s k ] f[u][mask] f[u][mask] 。
最终的答案即为:
min
u
f
[
u
]
[
2
n
−
1
]
\min_u f[u][2^n - 1]
uminf[u][2n−1]
细节:当
m
a
s
k
mask
mask 中只包含一个
1
1
1 时,我们无法枚举满足要求的上一个「关键节点」
v
v
v 。这里的处理方式与方法一中的类似:若
m
a
s
k
mask
mask 中只包含一个
1
1
1 ,说明我们位于开始的节点,还未经过任何路径,因此状态转移方程直接写为:
f
[
u
]
[
m
a
s
k
]
=
0
f[u][mask]=0
f[u][mask]=0
此外,在状态转移方程中,我们需要多次求出
d
(
v
,
u
)
d(v, u)
d(v,u) ,因此我们可以考虑在动态规划前将所有的
d
(
v
,
u
)
d(v,u)
d(v,u) 预处理出来。这里有两种可以使用的方法,时间复杂度均为
O
(
n
3
)
O(n^3)
O(n3) :
- 我们可以使用 F l o y d Floyd Floyd 算法求出所有点对之间的最短路径长度;
- 我们可以进行 n n n 次广度优先搜索,第 i i i 次从节点 i i i 出发,也可以得到所有点对之间的最短路径长度。
class Solution {
public:
int shortestPathLength(vector<vector<int>>& g) {
int n = g.size();
vector<vector<int>> d(n, vector<int>(n, n + 1));
for (int i = 0; i < n; ++i) for (int j : g[i])
d[i][j] = 1;
// 使用floyd算法预处理出所有点对之间的最短路径长度
for (int k = 0; k < n; ++k)
for (int i = 0; i < n; ++i)
for (int j = 0; j < n; ++j)
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
vector<vector<int>> f(n, vector<int>(1 << n, INT_MAX / 2));
for (int mask = 1; mask < (1 << n); ++mask) {
// 如果mask只包含一个1,即是2的幂
if ((mask & (mask - 1)) == 0) {
int u = __builtin_ctz(mask);
f[u][mask] = 0; // 从某一点开始到u为止,经过的关键节点对应的二进制表示为mask时的最短路径长度
} else {
for (int u = 0; u < n; ++u) {
if (mask & (1 << u)) { // 如果经过了点u
for (int v = 0; v < n; ++v) { // 枚举上一个关键节点
if ((mask & (1 << v)) && u != v)
f[u][mask] = min(f[u][mask], f[v][mask ^ (1 << u)]
+ d[v][u]);
}
}
}
}
}
int ans = INT_MAX;
for (int u = 0; u < n; ++u) ans = min(ans, f[u][(1 << n) - 1]);
return ans;
}
};
复杂度分析:
- 时间复杂度: O ( n 2 ⋅ 2 n ) O(n^2 \cdot 2^n) O(n2⋅2n) 。状态的总数为 O ( n ⋅ 2 n ) O(n \cdot 2^n) O(n⋅2n) ,对于每一个状态,我们需要 O ( n ) O(n) O(n) 的时间枚举 v v v 进行状态转移,因此总时间复杂度 O ( n 2 ⋅ 2 n ) O(n^2 \cdot 2^n) O(n2⋅2n) 。预处理所有 d ( u , v ) d(u, v) d(u,v) 的时间复杂度为 O ( n 3 ) O(n^3) O(n3) ,但其在渐近意义下小于 O ( n 2 ⋅ 2 n ) O(n^2 \cdot 2^n) O(n2⋅2n) ,因此可以忽略。
- 空间复杂度: O ( n ⋅ 2 n ) O(n \cdot 2^n) O(n⋅2n) ,即为存储所有状态需要使用的空间。