1.特征点匹配的定义
特征点匹配是一种在两幅图像中寻找相互对应的特征点,并建立它们之间的对应关系的过程。具体而言,首先通过特征检测算法在两幅图像中寻找相互对应的特征点,然后,对于每个特征点,通过描述子提取算法计算其描述子,最后,使用匹配算法对两组特征点的描述子进行比较,以找到相互匹配的特征点对。
2.DMatch() 用于表示特征点匹配的数据结构
cv::DMatch::DMatch ( int queryldx,
int _trainldx,
int _imgldx,
float _distance
)
- queryIdx:查询描述子集合中的索引
- trainIdx:训练描述子集合中的索引
- imgldx:训练描述子来自的图像索引
- distance:两个描述符之间的距离
3.特征点匹配类DescriptorMatcher的介绍
在OpenCV中,特征点匹配的类主要是cv::DescriptorMatcher。DescriptorMatcher是一个抽象基类,用于特征点描述子之间的匹配操作。
DescriptorMatcher类有以下常用方法和函数
1.match():对两组特征描述子进行匹配,返回匹配结果(DMatch对象的向量)。
void cv::DescriptorMatcher::match ( InputArray queryDescriptors,
InputArray trainDescriptors,
std::vector< DMatch > & matches,
InputArray mask = noArray()
)const
- queryDescriptors:查询描述子集合
- trainDescriptors: 训练描述子集合
- matches:两个集合描述子匹配结果
- mask:描述子匹配时的掩码矩阵,用于指定匹配哪些描述子
2.knnMatch():对两组特征描述子进行k近邻匹配,返回每个查询描述子的k个最佳匹配结果。
void cv::DescriptorMatcher::knnMatch ( InputArray queryDescriptors,
InputArray trainDescriptors,
std::vector< std::vector< DMatch > > & matches,
int k,
InputArray mask = noArray(),
bool compactResult = false
)const
- queryDescriptors:查询描述子集合
- trainDescriptors: 训练描述子集合
- matches:描述子匹配结果
- k:每个查询描述子在训练描述子集合中寻找的最优匹配结果的数目
- mask:描述子匹配时的掩码矩阵,用于指定匹配哪些描述子。
- compactResult:输出匹配结果数目是否与查询描述子数目相同的选择标志
3.radiusMatch():对两组特征描述子进行半径匹配,返回每个查询描述子在指定半径内的最佳匹配结果。
void cv::DescriptorMatcher::radiusMatch ( InputArray queryDescriptors,
InputArray trainDescriptors,
std::vector< std::vector< DMatch > > &matches,
float maxDistance,
InputArray mask = noArray(),
bool compactResult = false
)const
- queryDescriptors:查询描述子集合
- trainDescriptors: 训练描述子集合
- matches:描述子匹配结果
- maxDistance:两个描述子之间满足匹配条件的距离阀值
- mask:描述子匹配时的掩码矩阵,用于指定匹配哪些描述子
- compactResult:输出匹配结果数目是否与查询描述子数目相同的选择标志
4.特征点匹配函数BFMatcher()
BFMatcher():暴力匹配
cv::BFMatcher::BFMatcher ( int normType =ORM_L2,
bool crossCheck = false
)
- normType:两个描述子之间距离的类型标志,可以选择的参数为NORM_LI、NORM_L2、NORM_HAMMING和NORM_HAMMING2。
- crossCheck:是否进行交叉检测的标志。
5.显示特征点匹配结果函数drawMatches()
void cv::drawMatches ( InputArray img1,
const std::vector< KeyPoint > & keypoints1,
InputArray img2,
const std::vector< KeyPoint > & keypoints2,
const std::vector< DMatch > &matches1to2,
InputOutputArray outlmg,
const Scalar & matchColor = scalar: :all(-1),
const Scalar & singlePointColor = scalar: :all(-1),
const std::vector<char>& matchesMask = std: :vector< char >(),
DrawMatchesFlags flags = DrawMatchesFlags: :DEFAULT
)
- imgl:第一张图像。
- keypointsl:第一张图像中的关键点
- img2:第二张图像。
- keypoints2:第二张图像中的关键点。
- matcheslto2:第一张图像中关键点与第二张图像中关键点的匹配关系。
- outImg:显示匹配结果的输出图像。
- matchColor:连接线和关键点的颜色。
- singlePointColor: 没有匹配点的关键点的颜色
- matchesMask:匹配掩码
- flags:绘制功能选择标志
6.示例代码
void orb_fearures(Mat &gray,vector<KeyPoint> &keypoints,Mat &descriptions){
Ptr<ORB> orb=ORB::create(1000,1.2f);
orb->detect(gray,keypoints);
orb->compute(gray,keypoints,descriptions);
}
void Matcher_f(Mat img1,Mat img2){
//提取特征点
vector<KeyPoint> keypoints1,keypoints2;
Mat descriptions1,descriptions2;
//计算特征点
orb_fearures(img1,keypoints1,descriptions1);
orb_fearures(img2,keypoints2,descriptions2);
//特征点匹配
vector<DMatch> matches;//定义存放匹配结果的变量
BFMatcher matcher(NORM_HAMMING);//定义特征点匹配的类,使用汉明距离
matcher.match(descriptions1,descriptions2,matches);//进行特征点匹配
ostringstream ss;
ss<<"matches="<<matches.size()<<endl;//匹配成功特征点数目
//通过汉明距离删选匹配结果
double min_dist=1000,max_dist=0;
for(int i=0;i<matches.size();i++){
double dist=matches[i].distance;
if(dist<min_dist) min_dist=dist;
if(dist>max_dist) max_dist=dist;
}
//输出所有匹配结果中最大韩明距离和最小汉明距离
ss<<"min_dist="<<min_dist<<endl;
ss<<"max_dist="<<max_dist<<endl;
//将汉明距离较大的匹配点对删除
vector<DMatch> good_matches;
for(int i=0;i<matches.size();i++){
if(matches[i].distance<=max(2*min_dist,20.0)){
good_matches.push_back(matches[i]);
}
}
ss<<"good_min="<<good_matches.size()<<endl;//剩余特征点数目
LOGD("%s",ss.str().c_str());
//绘制匹配结果
Mat outimg,outimg1;
drawMatches(img1,keypoints1,img2,keypoints2,matches,outimg);
drawMatches(img1,keypoints1,img2,keypoints2,good_matches,outimg1);
//显示结果
imwrite("/sdcard/DCIM/outimg.png",outimg);//未筛选结果
imwrite("/sdcard/DCIM/outimg1.png",outimg1);//最小汉明距离筛选
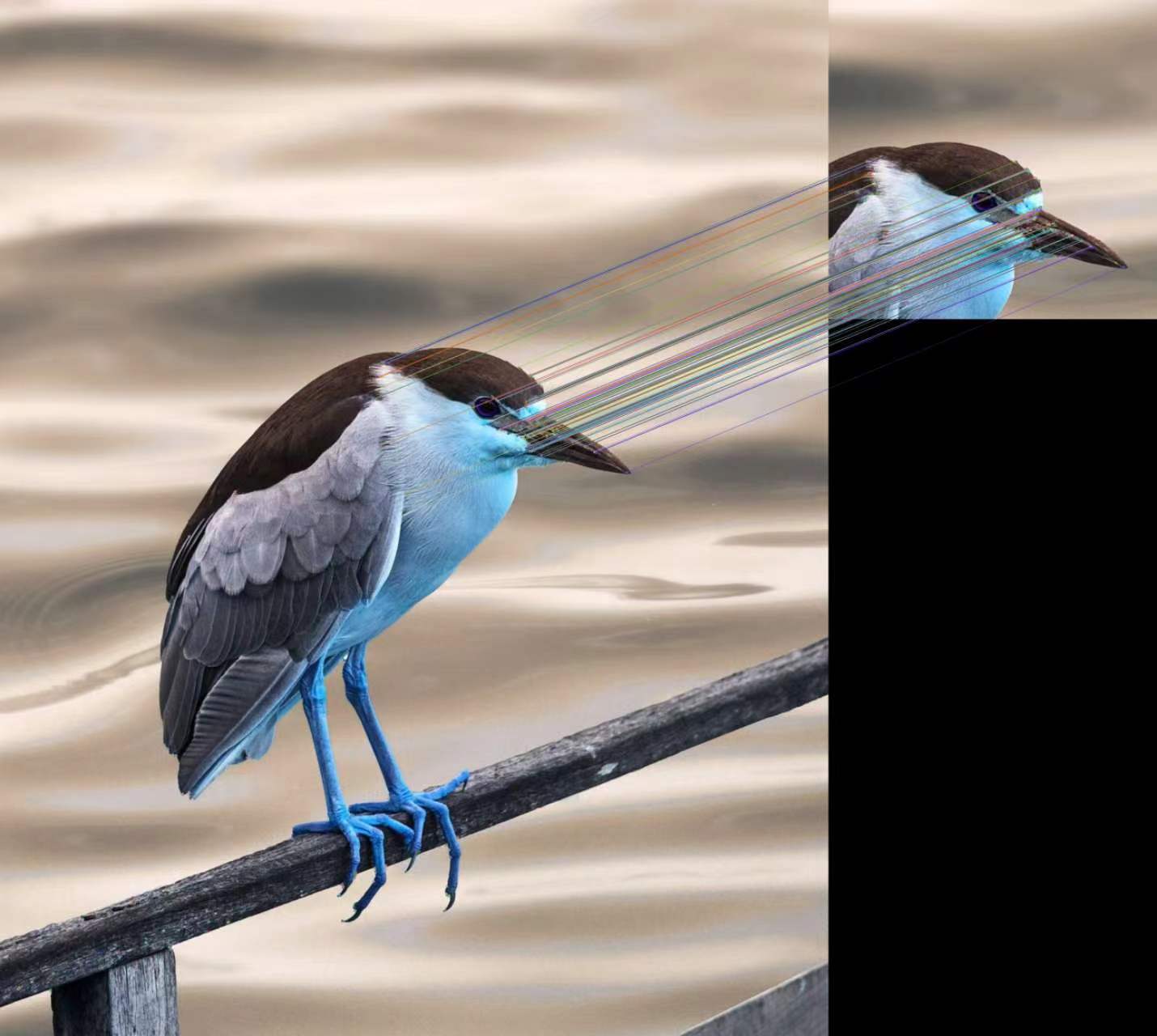
}未筛选的特征点匹配结果 :

最小汉明距离筛选特征点匹配结果: