课程地址和说明
线性代数实现p2
本系列文章是我学习李沐老师深度学习系列课程的学习笔记,可能会对李沐老师上课没讲到的进行补充。
这节就算之前内容的复习,后面以截图形式呈现
标量由只有一个元素的张量表示
import torch
x = torch.tensor([3.0])
y = torch.tensor([2.0])
# 加减法
print(x+y)
# 乘法
print(x * y)
# 除法
print(x / y)
# 幂运算
print(x**y)
运行结果:
tensor([5.])
tensor([6.])
tensor([1.5000])
tensor([9.])
你可以将向量视为标量值组成的列表
# 生成0-3的顺序列表,(函数是左闭右开)
x = torch.arange(4)
print(x)
运行结果:
tensor([0, 1, 2, 3])
通过张量的索引来访问任一元素
访问张量的长度
只有一个轴的张量,形状只有一个元素。
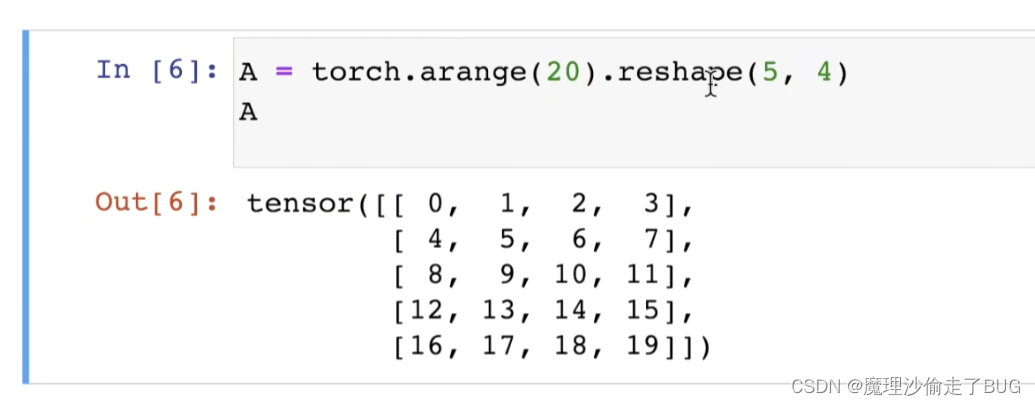
通过指定两个分量m和n来创建一个形状为m × n的矩阵
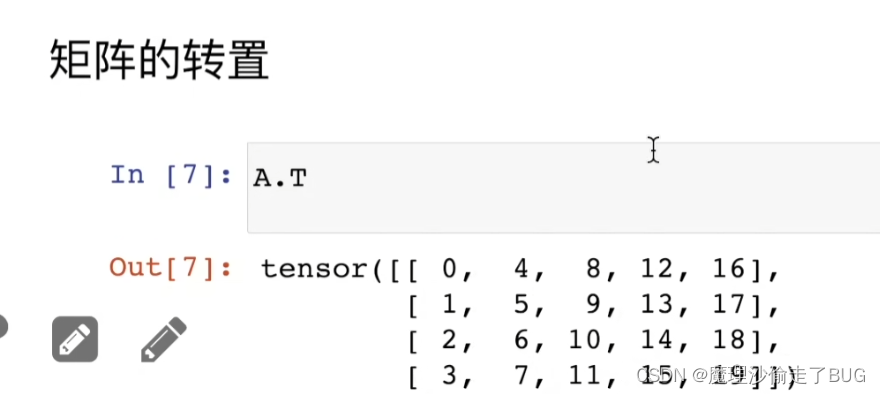
矩阵的转置
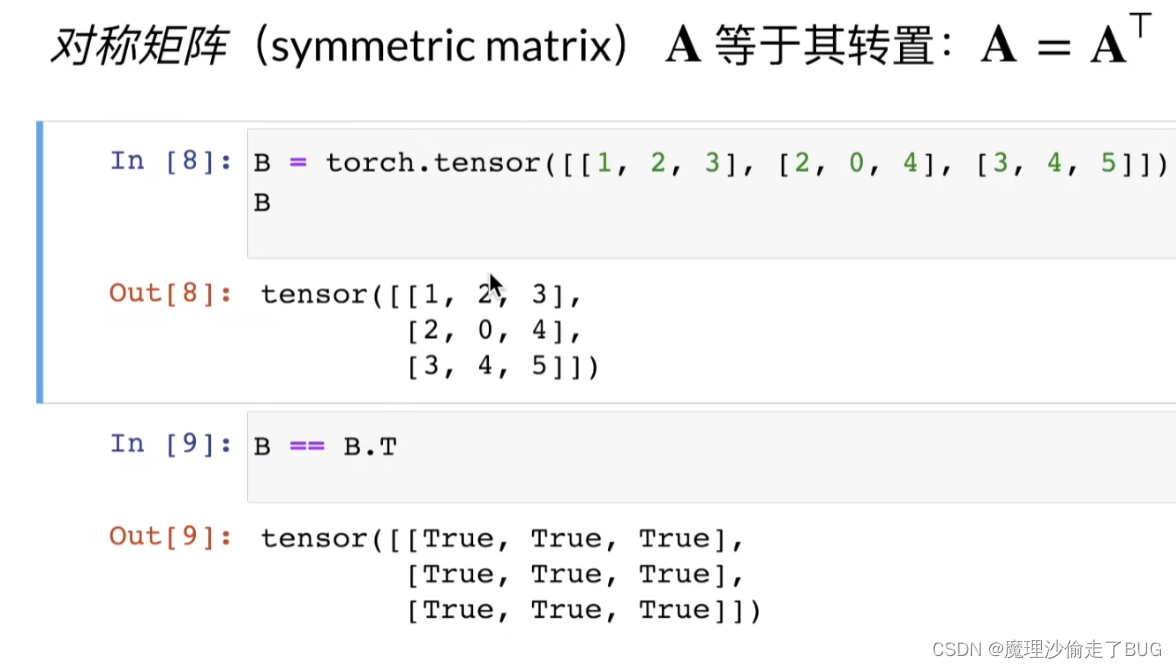
对称矩阵的转置
构造多轴的数据结构
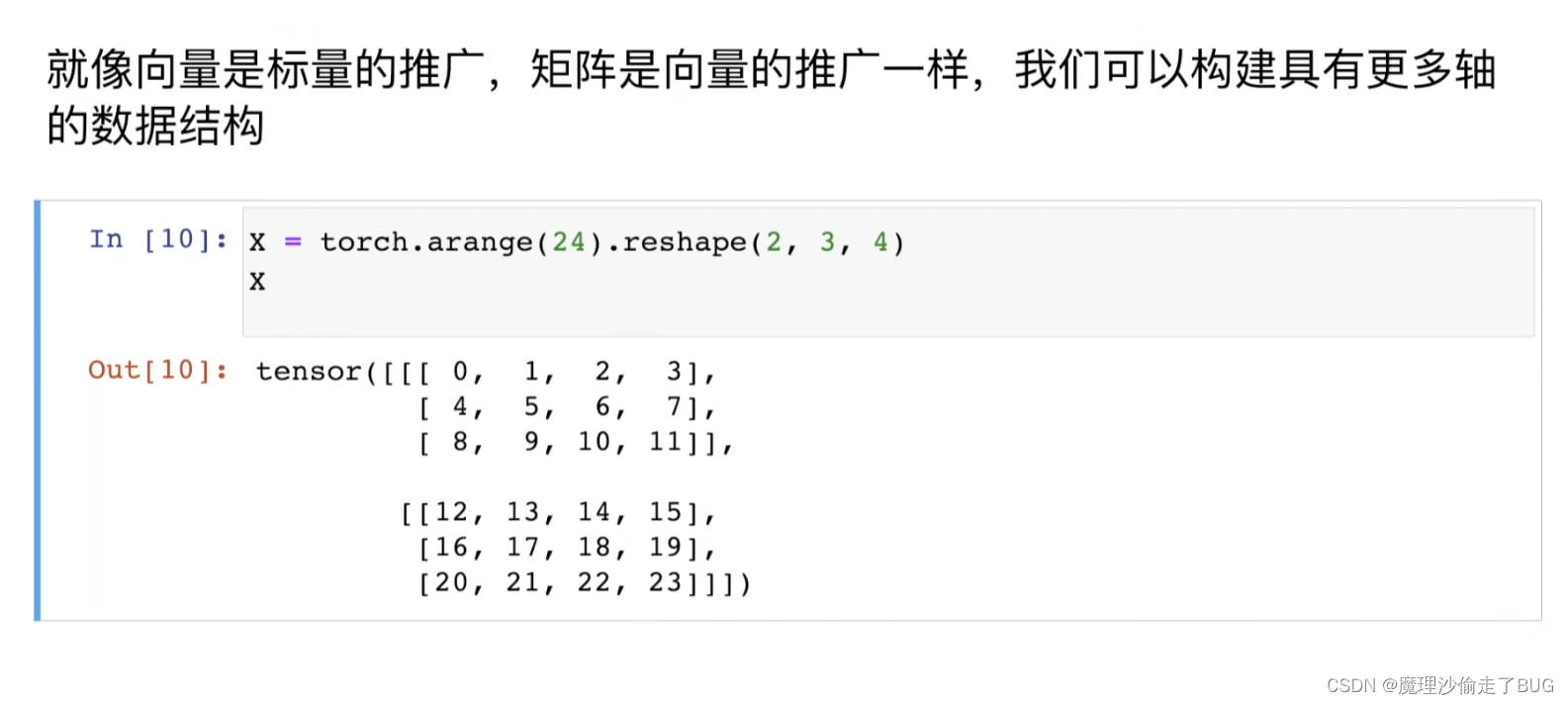
【注】就是构建多维数组
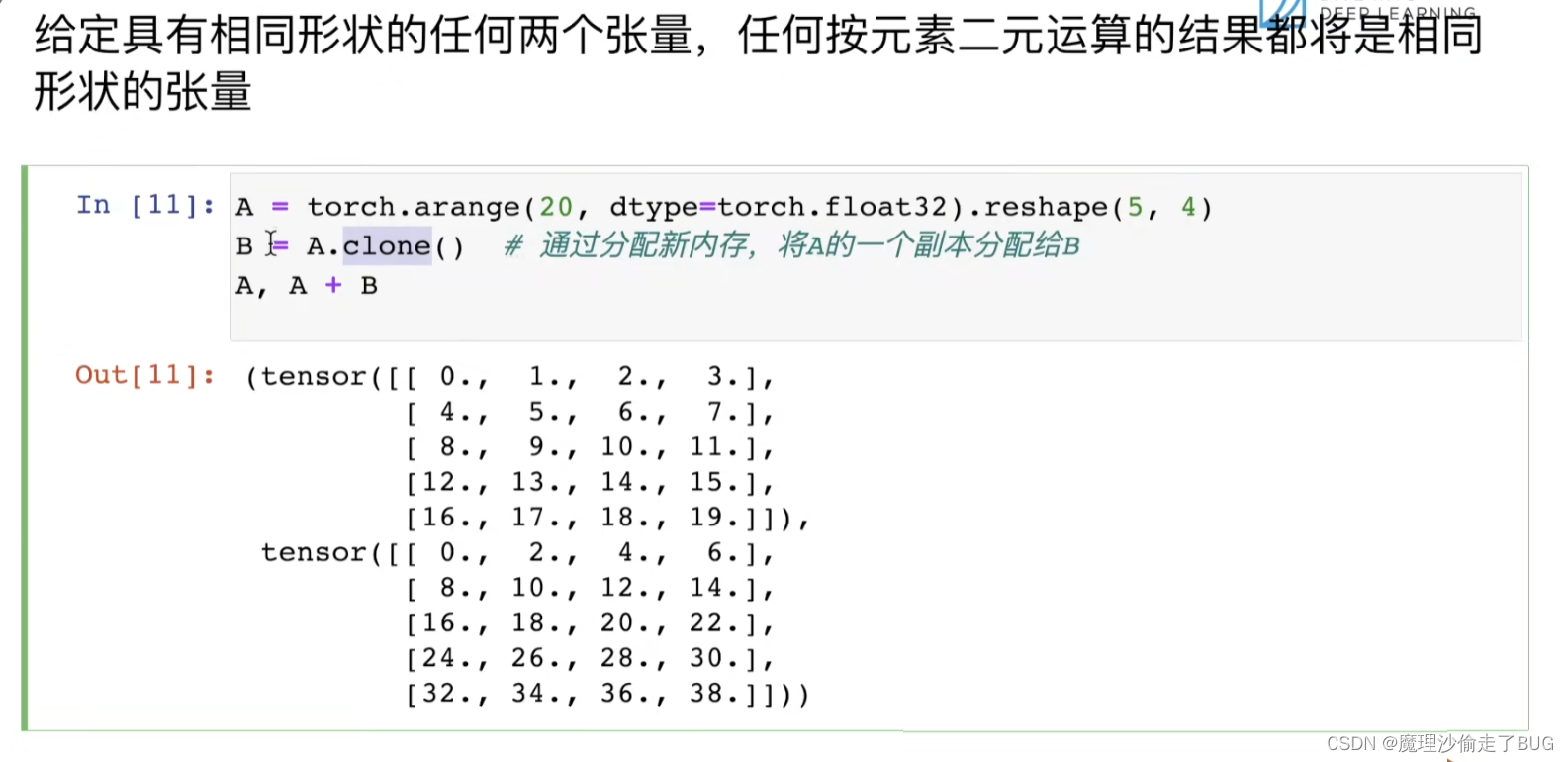
给定具有相同形状的任何两个张量,任何按元素二元运算的结果都将是相同形状的张量
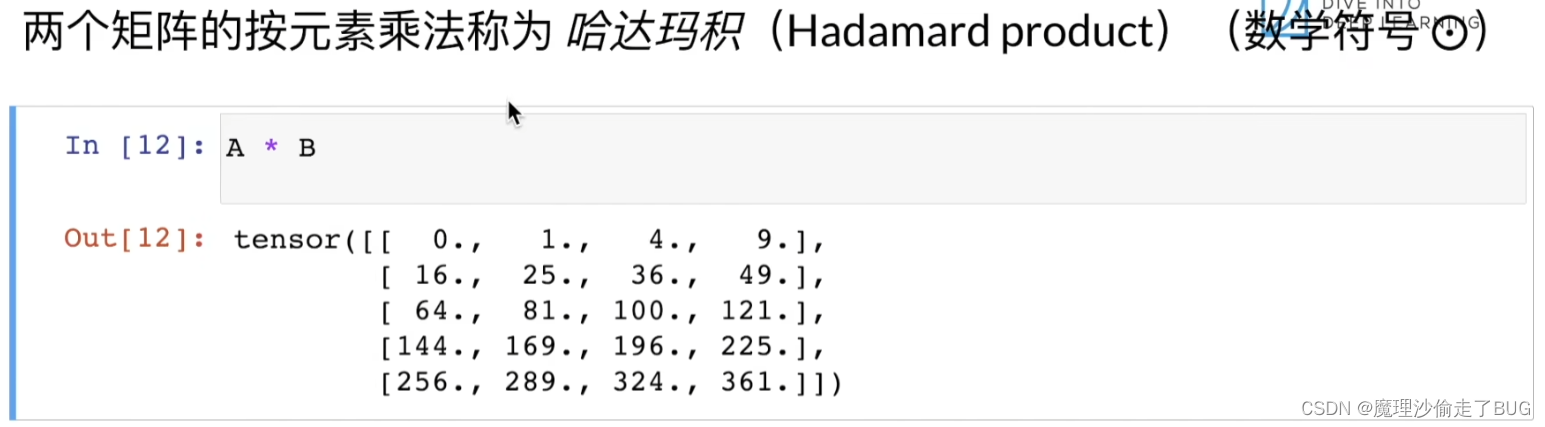
矩阵的哈达玛积
其实就是不按矩阵乘法来,按两个矩阵对应元素相乘得到个新矩阵(前提是矩阵是同形的,即两个相乘的矩阵行列数需要一致)
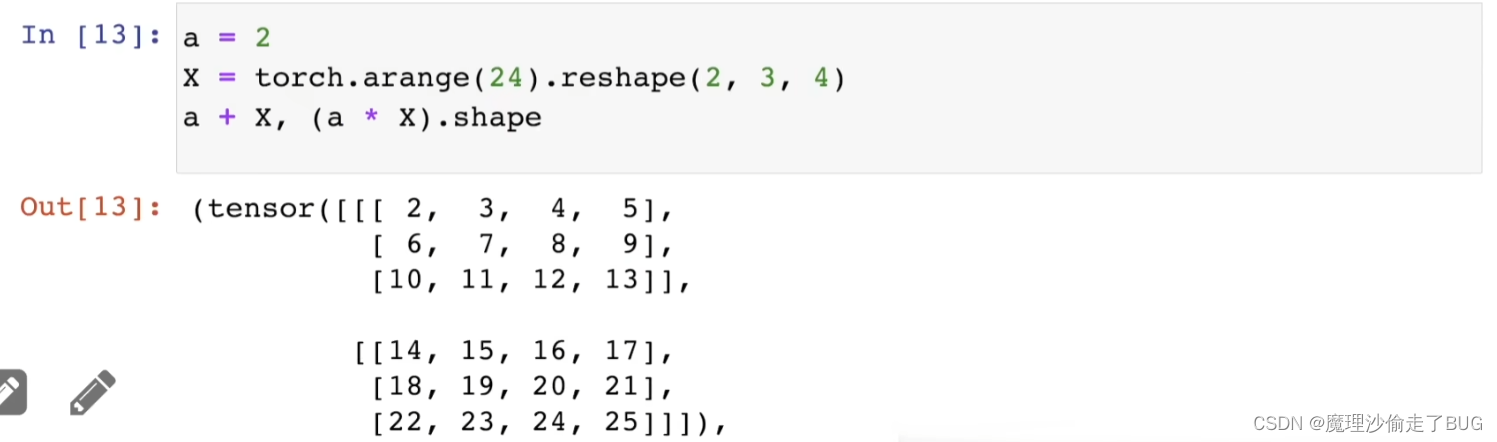
标量和矩阵相加是所有元素都与标量相加得到新矩阵
计算矩阵所有元素的和
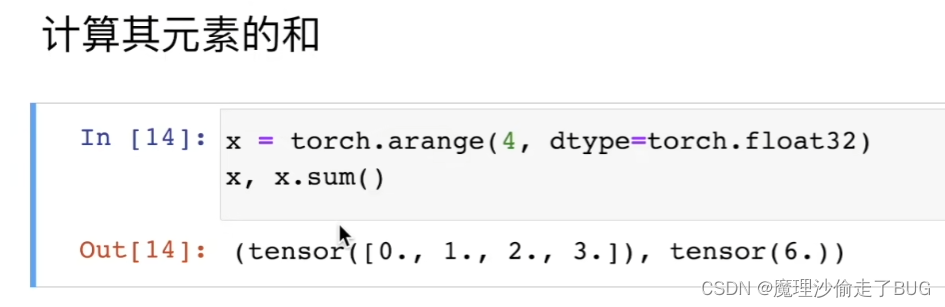
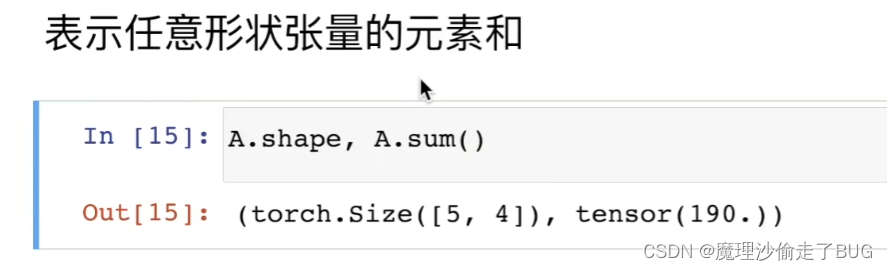
表示任意形状张量的元素和
不论张量形状如何,其求所有元素和的结果永远是标量
指定求和汇总张量的轴(按不同维度求和)
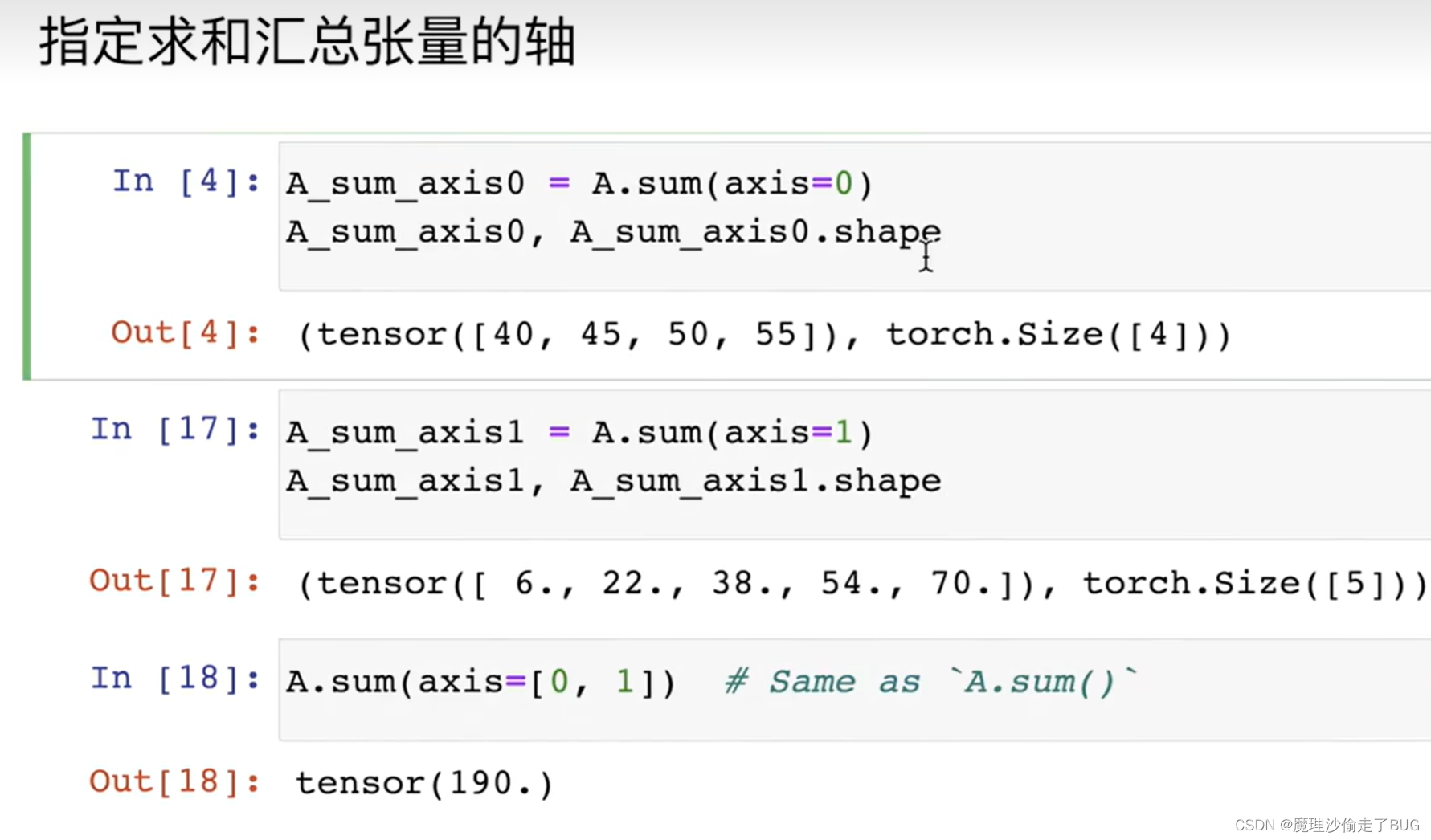
【注】axis是按不同维度求和,从0开始是第1个维度。这里理解上稍微有点难度,我写了代码:
# 按维度求和
C = torch.arange(12).reshape(3,4)
print(C)
# 第一个维度(按列)求和结果
result = C.sum(axis=0)
print(result)
# 第二个维度(按行)求和结果
result = C.sum(axis=1)
print(result)
# 对第一和第二维度合并求和
result = C.sum(axis=[0,1])
print(result)
运行结果:
tensor([[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11]])
tensor([12, 15, 18, 21])
tensor([ 6, 22, 38])
tensor(66)
# 按维度求和(三维版)
C = torch.arange(27).reshape(3,3,3)
print(C)
# 第一个维度求和结果
result = C.sum(axis=0)
print(result)
# 第二个维度求和结果
result = C.sum(axis=1)
print(result)
# 第三个维度求和结果
result = C.sum(axis=2)
print(result)
# 对第一和第二维度合并求和
result = C.sum(axis=[0,1])
print(result)
运行结果:
tensor([[[ 0, 1, 2],
[ 3, 4, 5],
[ 6, 7, 8]],
[[ 9, 10, 11],
[12, 13, 14],
[15, 16, 17]],
[[18, 19, 20],
[21, 22, 23],
[24, 25, 26]]])
tensor([[27, 30, 33],
[36, 39, 42],
[45, 48, 51]])
tensor([[ 9, 12, 15],
[36, 39, 42],
[63, 66, 69]])
tensor([[ 3, 12, 21],
[30, 39, 48],
[57, 66, 75]])
tensor([108, 117, 126])
3维版本就相当于这样一个列表,存储了3个矩阵
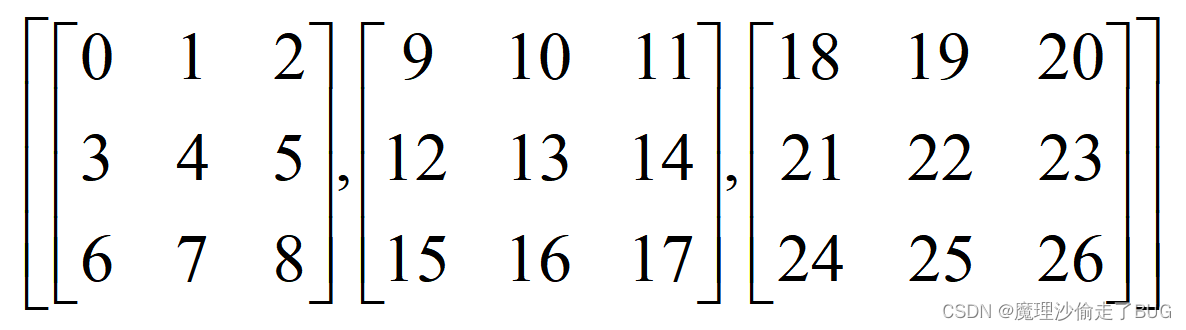
对第一个维度求和,相当于对每一个矩阵按列优先求和,比如第一个矩阵的(1,2)元素和第二个矩阵的(1,2)元素还有第三个矩阵的(1,2)元素相加就是求和结果中的(1,2)元素30。
对第二个维度求和,相当于对每一个矩阵的每一列求和, 然后得到该结果。
对第三个维度求和,对每一个矩阵的行求和,然后得到该结果
对第一个和第二个维度合并求和,相当于先对第一个维度求和,再对得到的二维矩阵的列求和。
一个与求和相关的量是平均值(mean或average)
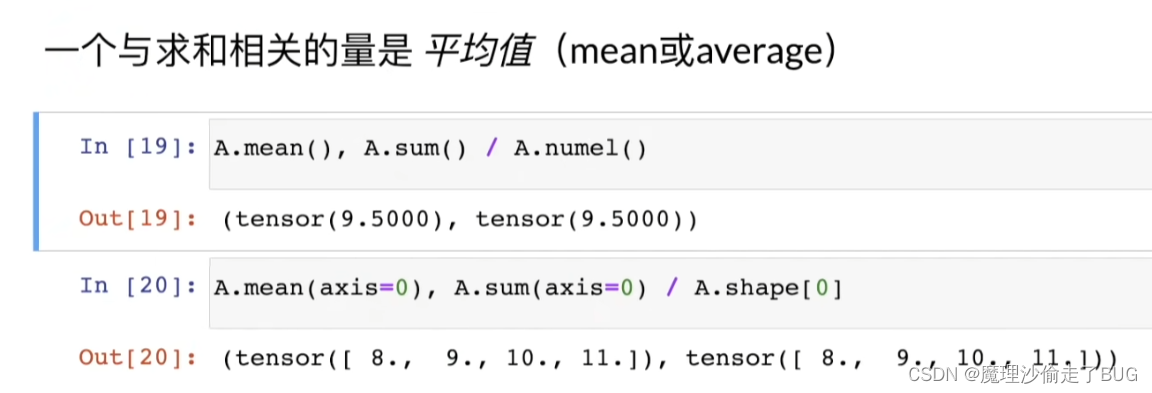
【注】In[20]是指按不同维度求均值
计算总和或均值时保持轴数不变
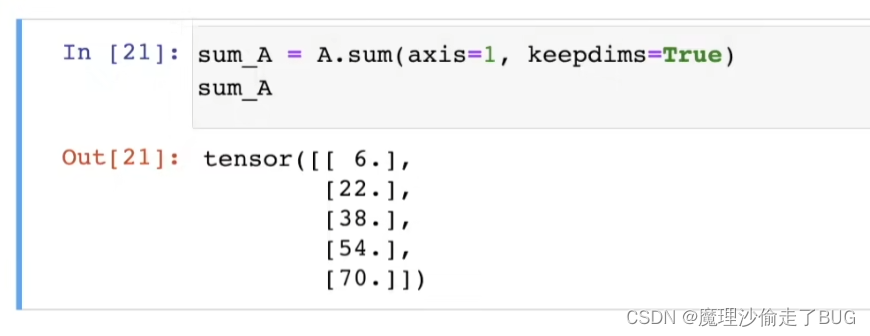
## 不丢维度对各维度求和
a = torch.tensor([[1,2,3],[0,1,2],[0,1,0]])
print(a.sum(axis=0, keepdims=True))
print(a.sum(axis=1, keepdims=True))
## 最后结果的维度还是2维,和原数据一致
运行结果:
tensor([[1, 4, 5]])
tensor([[6],
[3],
[1]])
通过广播将A除以sum_A
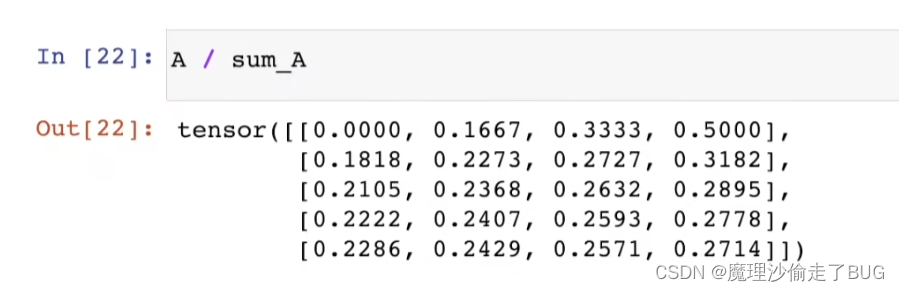
## 接上文的小写a
## 广播机制求均值
## 用广播机制将求和后的结果补成3X3矩阵再除
print(a)
print(a.sum(axis=0, keepdims=True))
print(a / a.sum(axis=0, keepdims=True))
运行结果:
tensor([[1, 2, 3],
[0, 1, 2],
[0, 1, 0]])
tensor([[1, 4, 5]])
tensor([[1.0000, 0.5000, 0.6000],
[0.0000, 0.2500, 0.4000],
[0.0000, 0.2500, 0.0000]])
某个轴计算A元素的累积总和
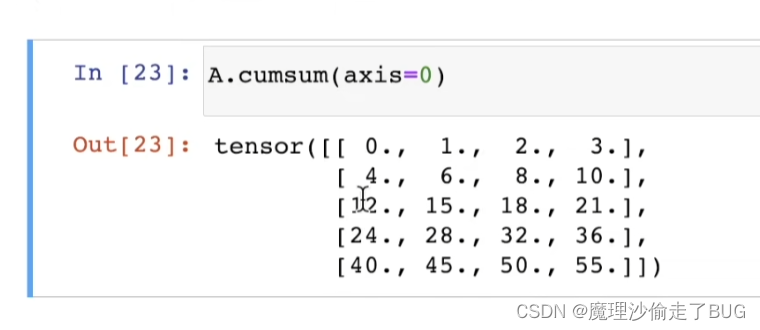
# 累加求和
b = torch.arange(12).reshape(3,4)
print(b)
# 按行累加(即第一行加到第二行变为新的第二行,新的第二行加到第三行变为新的第三行)
print(b.cumsum(axis=0))
# 按列累加(即第一列加到第二列变为新的第二列,新的第二列加到第三列变为新的第三列)
print(b.cumsum(axis=1))
运行结果:
tensor([[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11]])
tensor([[ 0, 1, 2, 3],
[ 4, 6, 8, 10],
[12, 15, 18, 21]])
tensor([[ 0, 1, 3, 6],
[ 4, 9, 15, 22],
[ 8, 17, 27, 38]])
点积是相同位置的按元素乘积的和

我们可以通过执行按元素乘法,然后进行求和来表示两个向量的点积

矩阵向量积 A x \bm{A}\bm{x} Ax是一个长度为 m m m的列向量,其 i t h i^{th} ith元素是点积 a i T x a_{i}^{T} \bm{x} aiTx

【注】这里就是想说明
A
\bm{A}
A是一个
m
×
n
m\times n
m×n的矩阵,
x
\bm{x}
x是一个
n
×
1
n\times 1
n×1的列向量,其点积结果就是一个
m
×
1
m\times 1
m×1的列向量。
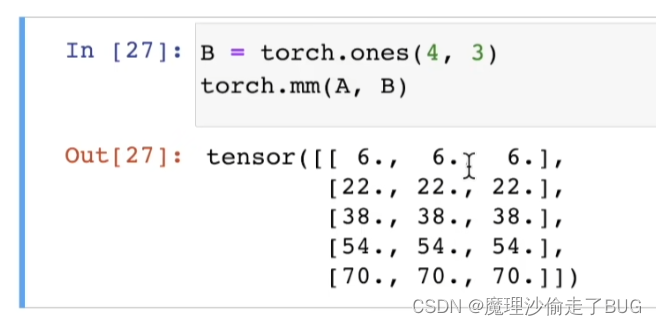
我们可以将矩阵-矩阵乘法AB看作是简单地执行m次矩阵-向量积,并将结果拼接在一起,形成一个n x m矩阵
【注】a是一个5×3的矩阵。
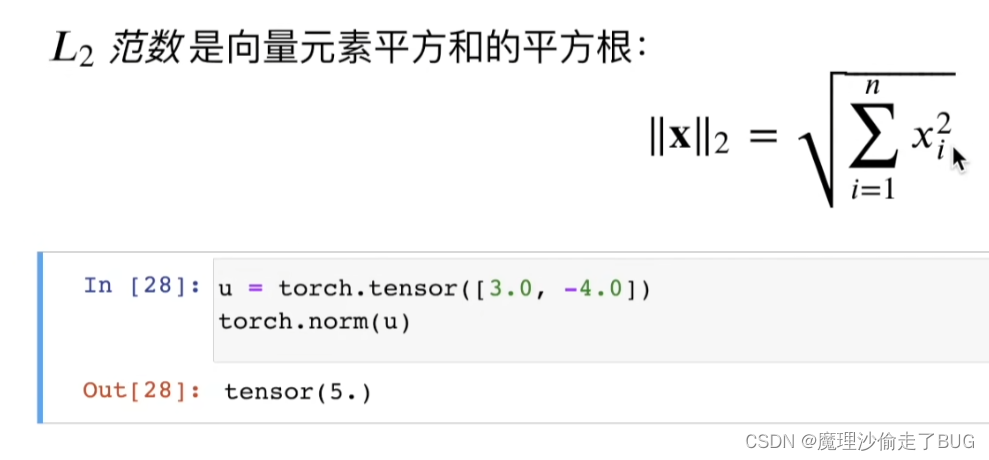
L2范数是向量元素平方和的平方根(欧氏距离)
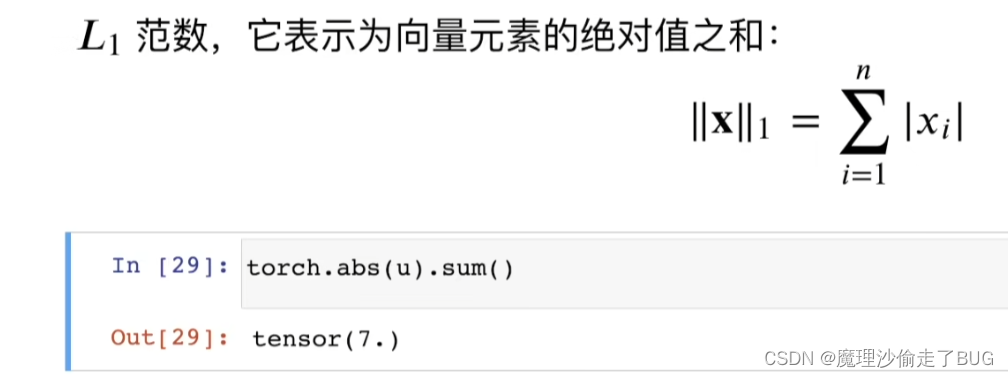
L范数,它表示为向量元素的绝对值之和
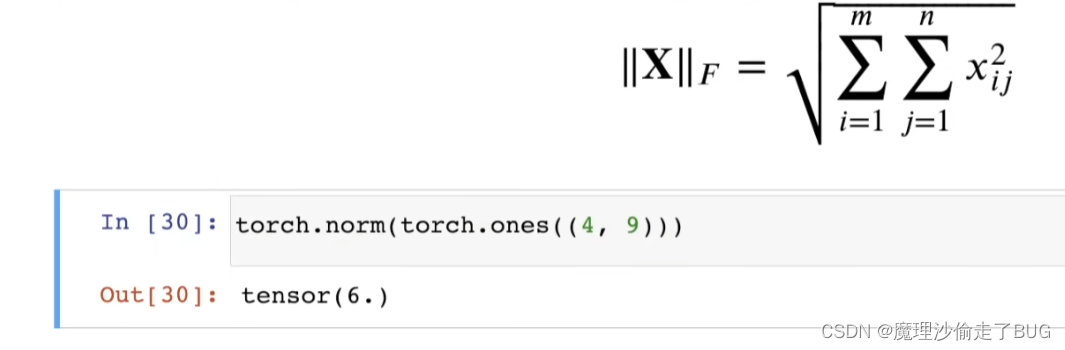
矩阵的弗罗贝尼乌斯范数(Frobenius norm)是矩阵元素的平方和的平方根