摘 要
自适应巡航控制系统是高级驾驶辅助系统的重要组成部分,可以有效地减轻驾驶员操作负担,提高汽车的舒适性、燃油经济性以及道路通行率,具有重要的工程应用价值。控制策略是自适应巡航系统研究的核心内容,因此针对自适应巡航系统控制策略的研究具有重要意义。
本文首先针对汽车自适应巡航控制系统的功能需求进行了分析,对固定车间时距算法和可变车间时距算法进行了分析,提出了可变车间时距算法的改进设计。提出了反应车间时距的概念,进一步设计了基于反应车间时距的模式切换策略。建立了车辆纵向动力学模型并对其动力性能进行验证。建立了车辆逆纵向动力学模型,包括驱动/制动切换策略、逆发动机模型和逆制动系模型。
然后,对基于变速积分PID 的系统控制策略进行研究。采用变速积分PID 控制,在MATLAB/Simulink 开发环境建立自适应巡航PID 控制策略算法,并分别在定速巡航模式和跟随控制模式下对PID 控制策略算法进行了仿真分析,仿真结果显示自适应巡航PID 控制在定速巡航模式中具有响应迅速、超调量小的优点,但是跟随控制模式复杂工况下控制效果不够理想,所以考虑在ACC 系统跟随控制模式的控制中采用MPC 方法。为了实现在跟随控制模式下的优良性能,本文接着进行了基于MPC 的自适应巡航控制策略研究。通过MPC 算法建立控制本车加速度的预测模型,并对其进行滚动优化和误差反馈校正分析,以MATLAB/Simulink 开发环境为基础,建立自适应巡航MPC 控制策略算法,实现对于自适应巡航汽车在行驶过程中的速度和车间时距的控制。
最后,对本文提出的ACC 系统控制策略进行仿真研究。建立MATLAB/Simulink 与CarSim 联合仿真平台,分析其在跟随前车定速、跟随前车加速和跟随前车减速三种ACC系统典型跟车工况下的性能,分别设定不同的跟车速度以及不同的加速和减速区间。结果验证本文所建立的自适应巡航MPC 控制策略算法在跟随控制模式下有着比较理想的表现。
关键词:自适应巡航控制系统;PID 控制;模型预测控制;Simulink/CarSim 联合仿真
第一章 绪论
1.1 研究背景及意义
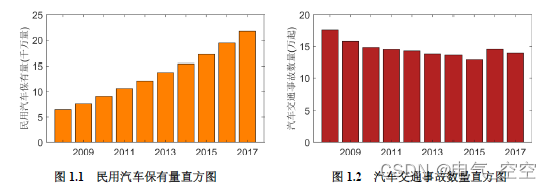
随着国民经济的快速发展,道路基础设施日趋完善,而居民收入的提高也促使消费观念发生转变,为了出行的方便以及运输的便利,私家车逐步普及,我国汽车保有量也在不断增长。我国是世界上交通量最大的国家,并且也是道路交通发展最快、汽车增量最多的国家之一。国家统计局发布的《2018 年国民经济和社会发展统计公报》显示,截止到2018 年末,全国民用汽车保有量为24028 万辆,比上年末增长10.5%。其中民用轿车保有量13451 万辆,增长10.4%[1]。随着车辆的增加,随之而来的交通拥堵、交通安全的问题也变得日益严重,道路交通事故发生的频率也越来越高。据国家统计数据显示,2017 年全国交通事故总计发生有203049 起,而其中汽车交通事故有139412 起,导致共有46817 人死亡,直接财产损失达 103978 万元。基于国家统计局发布2008 2017十年间的数据分析,得到民用汽车保有量和全国汽车交通事故数量总计直方图如下图1.1和1.2 所示。
汽车交通事故大多数是由于驾驶员操作失误造成的,驾驶汽车需要驾驶员时刻注意各种突发情况,所以驾驶员需要保持注意力集中的状态,而分心、疲劳驾驶和频繁操作都会影响驾驶员的注意力[2,3]。驾驶员需要随时注意本车和前车的相对距离及前车速度,调整本车车速。另外日益严重的交通拥堵,迫切需要寻找提高道路交通效率的方法。自适应巡航控制系统(Adaptive Cruise Control System)能够对驾驶员起到积极作用,方便驾驶员驾驶操作,这样驾驶员在汽车行驶过程中可以放松,不容易造成疲劳,自适应巡航控制系统还会提高道路通行率,乘坐舒适性和燃油经济性。所以对于自适应巡航控制系统的技术研究也就尤为关键。
自适应巡航控制系统是高级驾驶辅助系统(Advanced Driving Assistant System)的重要组成部分,其前身是传统的定速巡航控制系统,自适应巡航控制系统可以提高汽车的驾驶安全性和乘坐舒适性,并减少汽车对于环境造成的影响[4,5]。ACC 系统具有传统定速巡航控制系统的定速巡航功能,同时通过雷达等传感器监测前方行驶环境,计算本车与前车的相对车速以及相对车距,自动调节发动机节气门开度和制动轮缸制动压力,把驾驶员从操作加速踏板和制动踏板的一系列繁琐动作中解放出来,保证本车对于前车稳定的跟车行驶,这样在提高安全性和舒适性的同时,可以提高道路的通行能力[6,7]。随着科学技术的不断发展,ACC 系统控制器和传感器等汽车电子设备的升级以及系统算法的更新和完善,使得ACC 系统对于汽车行驶和制动的控制更加精确,也更加安全有效,对系统的普及起到了重要作用。但ACC 系统相较于ABS、ESP 和FCW 等其他驾驶辅助系统,技术还不够成熟,应用率也比较低[8]。目前ACC 系统研究以主车道目标车辆识别及判断为主,对于旁车道有并线意图的车辆预判研究还不够深入,对于路口等复杂工况还不具备通行能力。ACC 系统目前对于城市道路应用比较少,主要应用在高速路和高架道路等较为简单道路工况。作为ADAS 的重要组成部分,其对于未来智能交通先进系统有很大助益,同时掌握核心技术也使我国在智能驾驶领域取得较大发言权,ACC 系统无疑具有很大研究价值和推广意义。
1.2 自适应巡航控制系统概况
ACC 系统是从起初的定速巡航系统(Cruise Control System)发展而来的,利用雷达等传感器测目标车辆状态,并结合自车传感器提供的本车状态做出判断,通过控制发动机节气门开度和制动轮缸的压力,实现定速巡航以及跟车控制,并结合其他辅助驾驶系统应对随时产生的突发情况[9]。ACC 系统正常工作主要由三部分组成。第一部分由传感器及相对应的交通情况,第二部分就是控制器根据道路环境、交通情况以及本车状态,决定ACC 系统的接下来的运行状况;第三部分则是纵向控制器来决定车辆响应速度和控制程度,结合车辆执行机构完成动作。由于驾驶员行为很主观,ACC 系统应尽可能设计的与驾驶员行为相近,给驾驶员提供精准操作状态的反馈信息很重要,驾驶员需要在必要的时候接管行驶,ACC 系统配备手动设置本车车速和期望行车间距以满足特别的行驶优先权[10]。
早期ACC 系统只有定速巡航功能,并且是通过机械装置将节气门开度固定。ACC系统的定速巡航功能引入比例反馈是在上世纪六十年代后期,这样可以对节气门较为精确地控制到上个世纪八十年代,随着微处理器以及电子元器件的集成和发展,定速巡航控制系统功能更加完善,稳定可靠且容易操作。ACC 系统也逐渐发展成为具有速度控制和车距控制功能[11,12]。ACC 系统的主要功能是控制汽车按照驾驶员设定的速度行驶以及跟随状态下按照设定的行车间距进行跟车行驶,其系统结构如下图 1.3 所示。

1.3 自适应巡航控制策略研究现状
ACC 系统是从起初的定速巡航系统发展而来的,早期定速巡航系统只是采用机械装置,将节气门控制在固定位置从而来控制速度。上世纪六十年代后期,定速巡航控制开始引入比例反馈,可以实现节气门开度较为精确的控制。到了七十年代,开始逐步对汽车加速踏板开度和制动压力进行控制调节,从而实现本车与前车保持一定的行车间距并且保持与前车相对车速控制。从八十年代开始,德国戴姆勒和宝马公司,以及美国的福特、通用等公司开始将ACC 系统作为主要研发方向之一ACC 系统的控制策略也逐渐完善[15,16]。与国外的研究成果相比,我国在ACC 系统研究方面的科研成果较少,还没有比较完备且独立成熟的技术。
第二章 安全车距算法及模式切换策略研究
2.1 需求分析
自适应巡航控制系统通常以良好的跟车性能为需求,但是在控制过程中太过精确的车速跟踪以及车距保持并不一定有利,良好的跟车性能往往伴随着乘坐舒适性和燃油经济性的恶化。而如果放宽对跟车性能的要求追求燃油经济性,则意味着本车加速度的降低,会使前车切入频繁并降低跟车安全性。因此,本文定义功能需求如下:
(1)跟车性
以跟车行驶为基本功能,在前车稳定行驶工况中,车距和相对车速趋于零。在前车动态行驶工况中,为避免车距较大带来的旁车切入以及车距较小引起的驾驶员干涉,车距和相对车速应处于驾驶员允许误差范围。在前车紧急制动工况中,为避免追尾碰撞事故的发生,车距应处于安全车距内。
(2)舒适性
对于舒适性,自适应巡航控制系统应符合跟车特性有:驾驶员期望车距特性;驾驶员动态跟车特性,也就是前车加减速过程中,保证系统控制特性与驾驶员的动态跟车特性相似,尽量减小本车运动轨迹与期望轨迹的误差;符合驾驶员纵向乘坐舒适性标准,也就是本车纵向加减速运动要舒缓。而处于控制过程中,尽量使本车加减速以及制动舒缓,还可以在一定程度上提高汽车行驶过程的燃油经济性。
2.2 ACC 系统安全车距算法设计
安全车距模型在自适应巡航控制系统中是非常重要的,汽车的行驶安全性、道路利用率、交通流和车队稳定性及驾驶员接受度,都受到安全车距模型直接影响。安全车距设计较大会使道路利用率低,汽车的行驶安全虽然可以得到保证,但旁车道其他汽车切入本车前方。如果安全车距设计较小可以提高道路的利用率,但对汽车控制效果要求比较高,会使驾驶员感到紧张,制动作用时间以及驾驶员所需要的反应时间不够充足,容易造成交通事故。所以选择和设计合理的安全车距模型至关重要,这会直接决定ACC 系统设计性能。
安全车距模型大致可分为两类,固定安全距离模型和可变安全距离模型。汽车行驶时其安全距离与本车车速和道路环境无关,安全距离保持不变,即为固定安全距离模型。这种安全车距模型简单且容易实现,但不能满足实际工况需求。而进一步可变安全距离模型,此种算法主要就是基于车间时距(Time Headway)设计的,基本上可分为固定车间时距CTH ( Constant Time Headway ) 和可变车间时距VTH ( Variable TimeHeadway)两种[46,47]。







