本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第37章 DAC数模转换模块
37.1 SPI-DAC模块工作原理
本次实验使用的SPI-DAC模块是定制模块,原理图如下图所示:
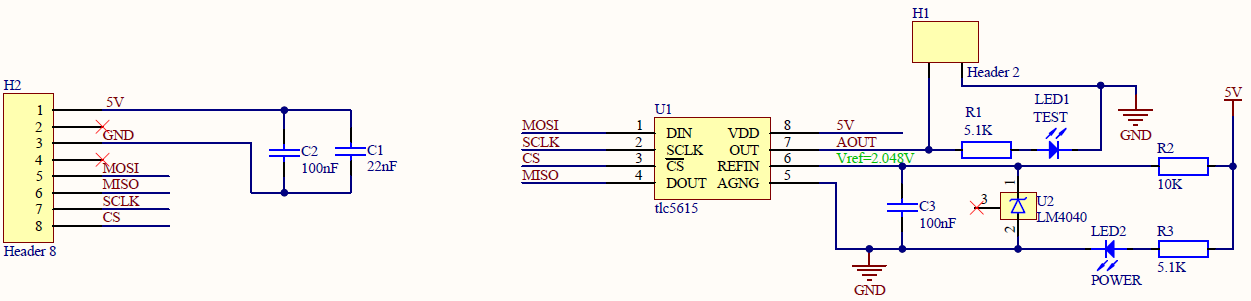
核心芯片是TLC5615,主机通过SPI接口发出一个数字量,TCL5615将数字量转化为模拟量,并通过OUT引脚输出模拟电压来点亮LED。通过LED的亮度形象地感受DAC的效果。这个模块的参考电压是2.048V,可以输出的最大电压是2倍参考电压,即4.096V。
TLC5615是一个10bit的DAC转换芯片,用户需要将需要转换的数字量左移2bit后再通过SPI发送给TLC5165,数据格式和转换关系如下图所示:


由于TLC5615是10位DAC,它允许主控每次发送12位或者16位的数据,12位和16位的发送数据格式要求如下图所示。

这个模块的使用比较简单,重点是在SPI的通信上,其次是在发送数据的时候需要移位。
37.2 模块配置
本次实验使用的是开发板配套扩展板的SPI组,如下图所示:

使用的SPI引脚是P202/P203/P204和P205,SPI引脚对应使用的是RA6M5的Common SPI0:

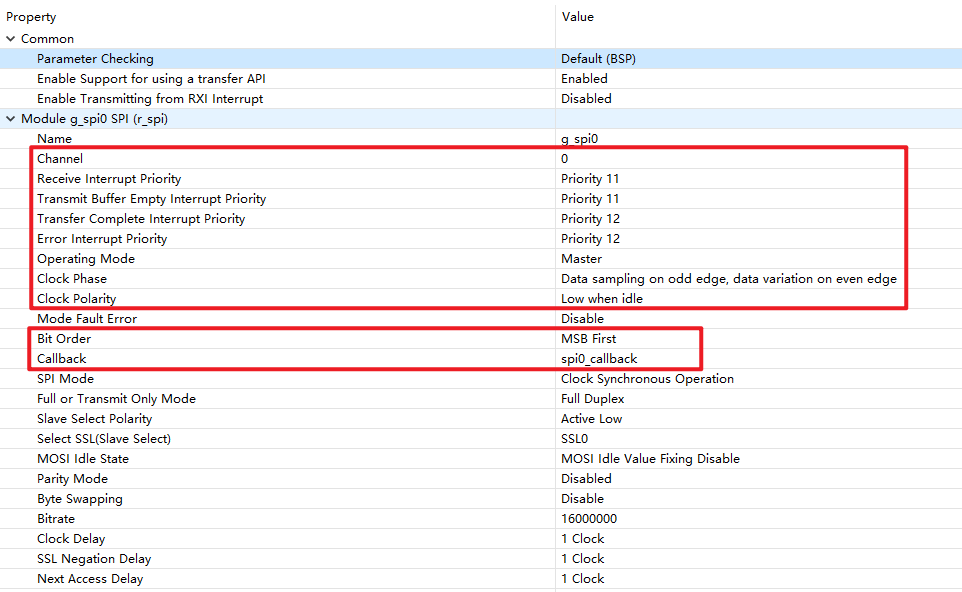
本次实验使用的SPI-DAC模块控制比较简单,对于SPI的Stack配置使用默认参数即可,使能发送buffer空中断,配置中断对调函数,如下图所示:
37.3 外设驱动
37.3.1 GPIO驱动
本次实验的SPI片选信号脚为P205,它的驱动如下:
static struct IODev gSPIDACCSDev = {
.name = "SPIDAC CS",
.port = BSP_IO_PORT_02_PIN_05,
.Init = IODrvInit,
.Read = IODrvRead,
.Write = IODrvWrite,
.next = NULL
};
void IODevicesCreate(void)
{
IODeviceInsert(&gSPIDACCSDev);
}
对于GPIO的驱动函数参考《32.4.1 GPIO驱动》。
37.3.2 SPI驱动
参考《35.4.2 SPI驱动》。
37.4 DAC驱动程序
37.4.1 SPI-DAC设备对象封装
要操纵SPI-DAC模块,只需要初始化、写入数值。为了更具观赏性,还可以提供写入多个数值的操作。把这些特性封装为一个结构体,代码如下(dev_spi_dac.h):
typedef struct SPIDACDev{
char *name;
int (*Init)(struct SPIDACDev *ptdev);
int (*SetValue)(struct SPIDACDev *ptdev, float voltage);
int (*Write)(struct SPIDACDev *ptdev, unsigned char *buf, unsigned int length);
}SPIDACDevice;
然后在dev_spi_dac.c里构造一个SPIDACDevice结构体,并给上层代码提高获得这个结构体的函数,代码如下:
static SPIDACDevice gDAC = {
.name = "SPI DAC",
.Init = SPIDACDevInit,
.SetValue = SPIDACDevSetValue,
.Write = SPIDACDevWrite,
};
struct SPIDACDev *SPIDACGetDevice(void)
{
return &gDAC;
}
37.4.2 初始化SPI-DAC
初始化SPI-DAC模块,本质就是初始化SPI控制器,代码如下:
static int SPIDACDevInit (struct SPIDACDev *ptdev)
{
if(NULL == ptdev) return -EINVAL;
gSPI = SPIDeviceFind("SPIDAC SPI");
if(NULL == gSPI) return -ENODEV;
if(ESUCCESS != gSPI->Init(gSPI)) return -EIO;
return ESUCCESS;
}
37.4.3 输出一个模拟量
要输出指定数字量,需要根据TLC5615的数据格式进行移位计算,再通过SPI发送给TLC5615:
static int SPIDACDevSetValue (struct SPIDACDev *ptdev, float voltage)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == gSPI) return -EINVAL;
if(DAC_OUT_MAX_VOLTAGE < voltage) return -EINVAL;
unsigned short value = (unsigned short)((voltage*1024)/(DAC_OUT_MAX_VOLTAGE));
value = (unsigned short)(value<<2);
return gSPI->Write(gSPI, (unsigned char*)&value, 2);
}
37.4.4 输出N个模拟量
为了方便用户使用,将N个数字量在模块驱动函数内部进行格式转换,然后再通过SPI传输给转换芯片:
static int SPIDACDevWrite(struct SPIDACDev *ptdev, unsigned char *buf, unsigned int length)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == gSPI) return -EINVAL;
if(NULL == buf) return -EINVAL;
if(0 == length) return -EINVAL;
unsigned short *pbuf = (unsigned short*)buf;
for(unsigned int i=0; i<length; i+=2)
{
pbuf[i] = (unsigned short)(pbuf[i]<<2);
}
return gSPI->Write(gSPI, buf, length);
}
37.5 测试程序
本次实验使用SPI传输,连续发送0~4V的电压给DAC模块,以实现呼吸灯效果:
void DeviceTest(void)
{
UartDevicesRegister();
TimerDevicesRegister();
SPIDevicesRegister();
IODevicesRegister();
SPIDACDevice *pDevice = SPIDACGetDevice();
if(NULL == pDevice)
{
xprintf("Failed to Find SPI DAC Devide!\r\n");
return;
}
pDevice->Init(pDevice);
bool dir = false;
volatile float value = 0;
while(1)
{
if(value > 4)
dir = true;
else if(value < 0)
dir = false;
if(dir)
value += (float)0.5;
else
value -= (float)0.5;
pDevice->SetValue(pDevice, value);
mdelay(300);
}
}
37.6 测试结果
将SPI-DAC模块插入到扩展板上后,再将程序烧写到开发板上运行,用户可以看到SPI-DAC模块上的LED呈现呼吸灯效果。








