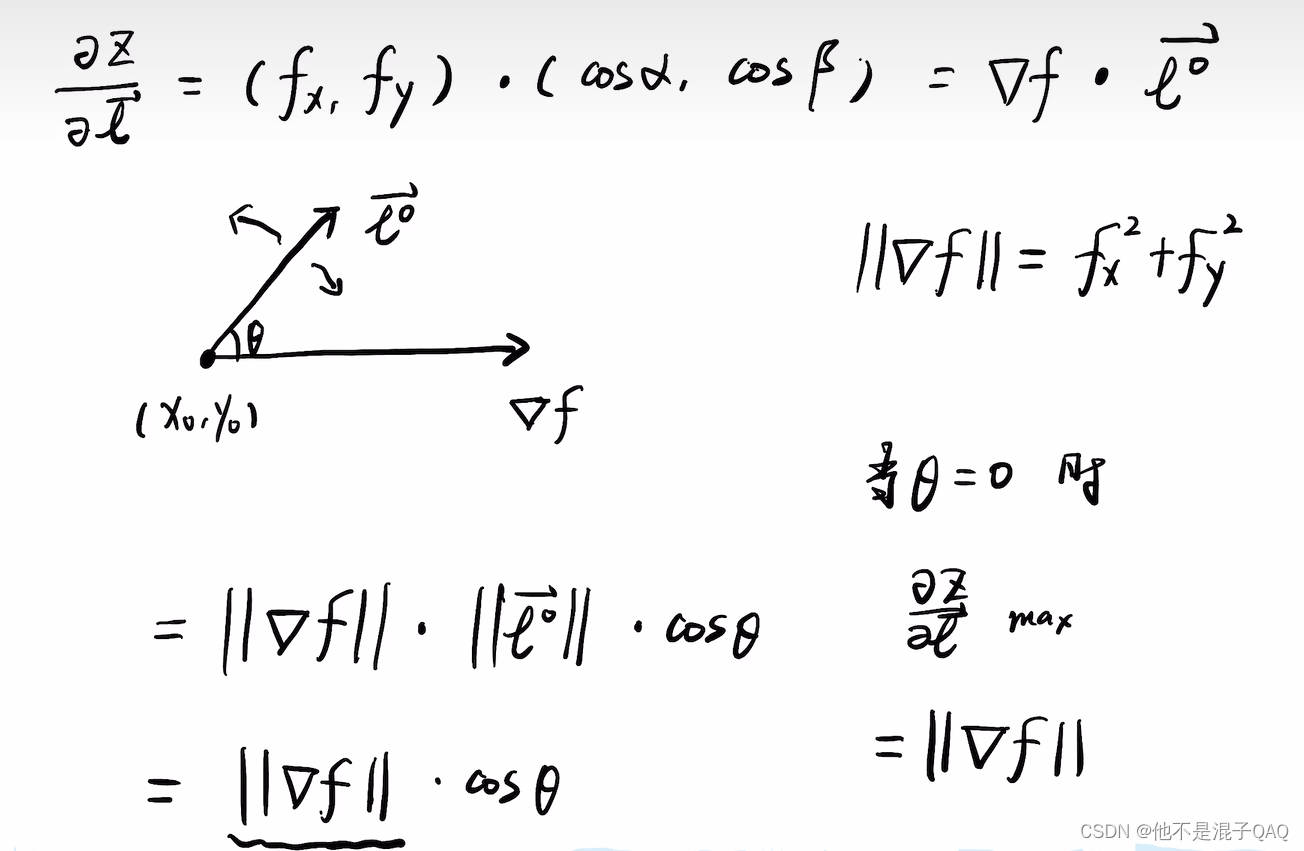
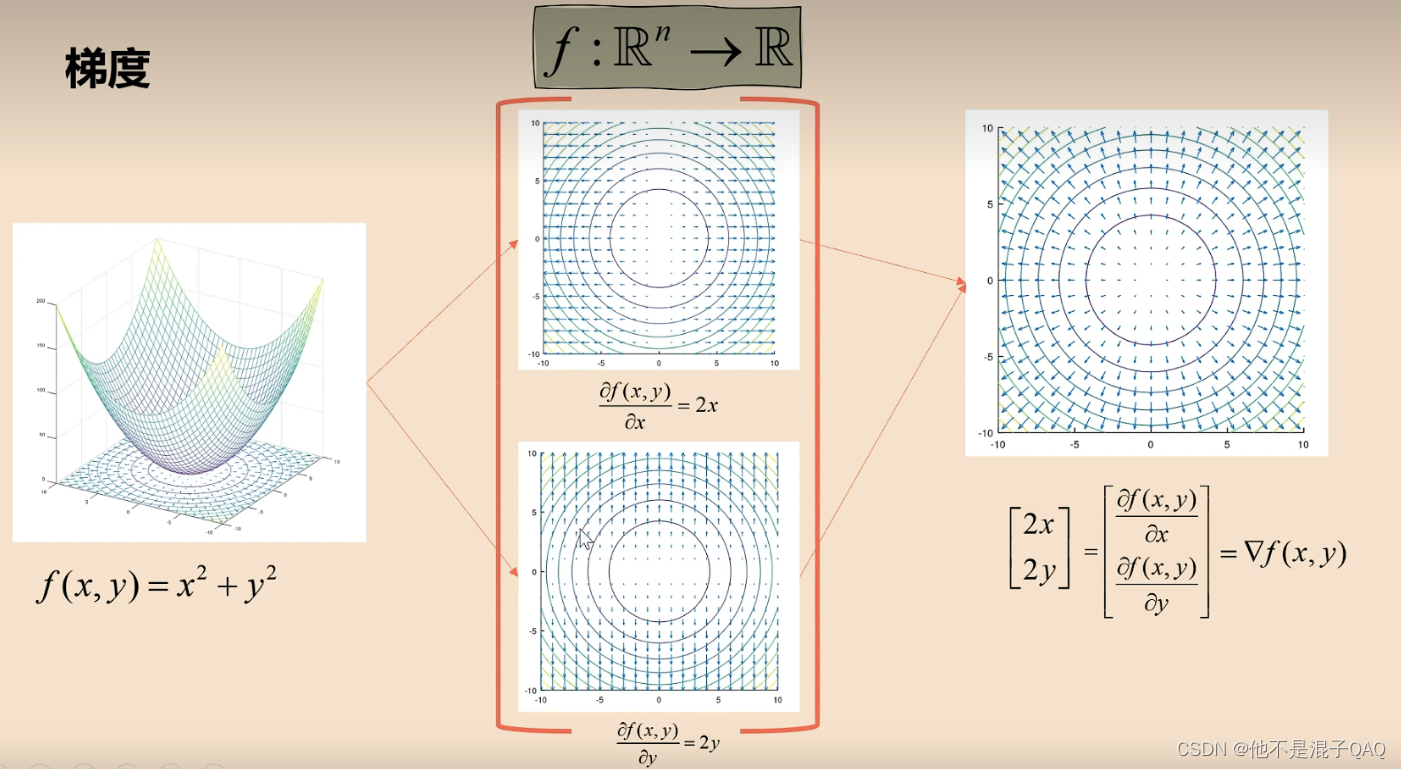
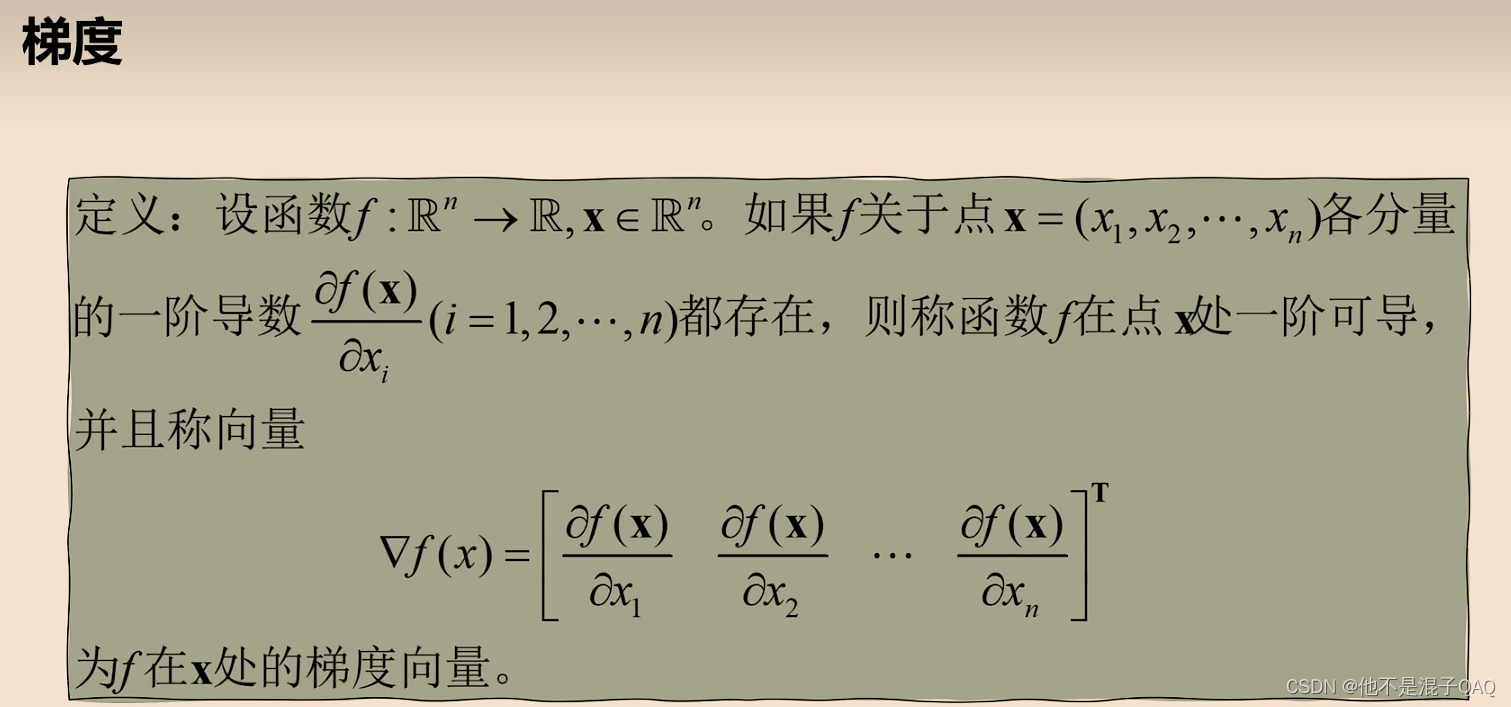
梯度
最优化理论
最优化基础---基本概念:凸优化、梯度、Jacobi矩阵、Hessian矩阵_哔哩哔哩_bilibili
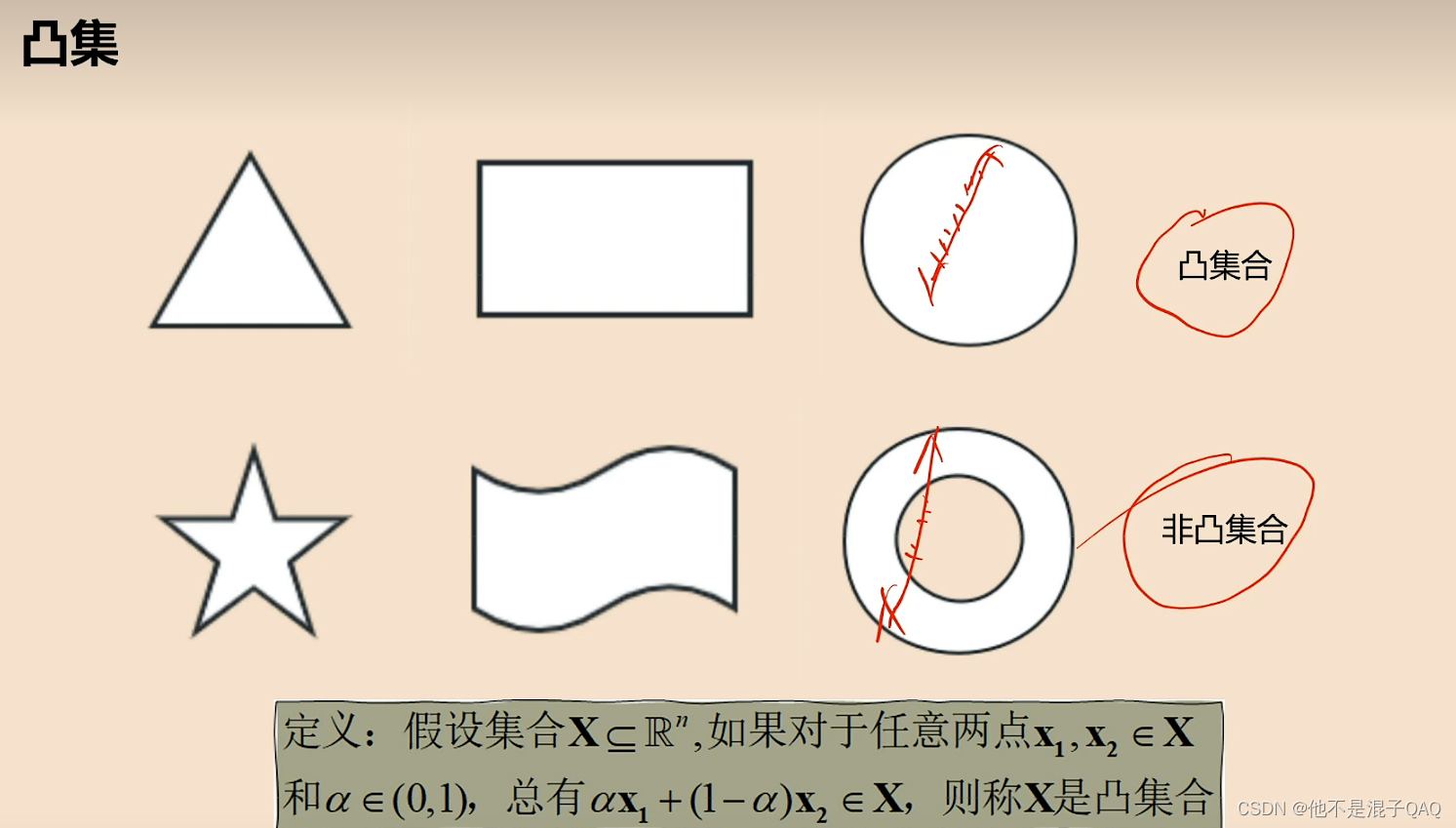 从图像来看:存在两点连线上的点不在集合内
从图像来看:存在两点连线上的点不在集合内
定义 ax1+(1-a)x2 其实就是两点连线上的点
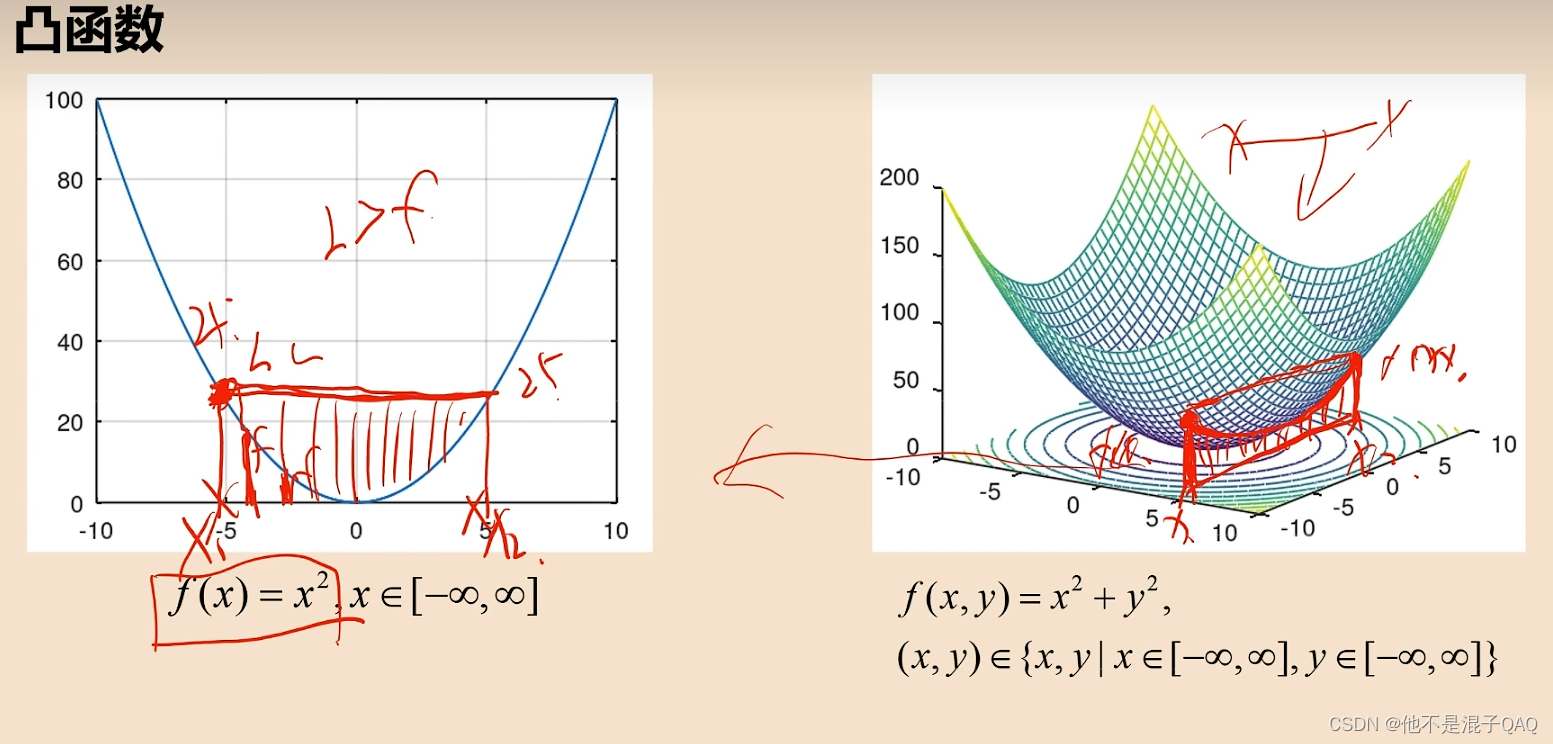
可用 与函数围成的面积 和 与坐标轴围成的面积 角度理解凸函数

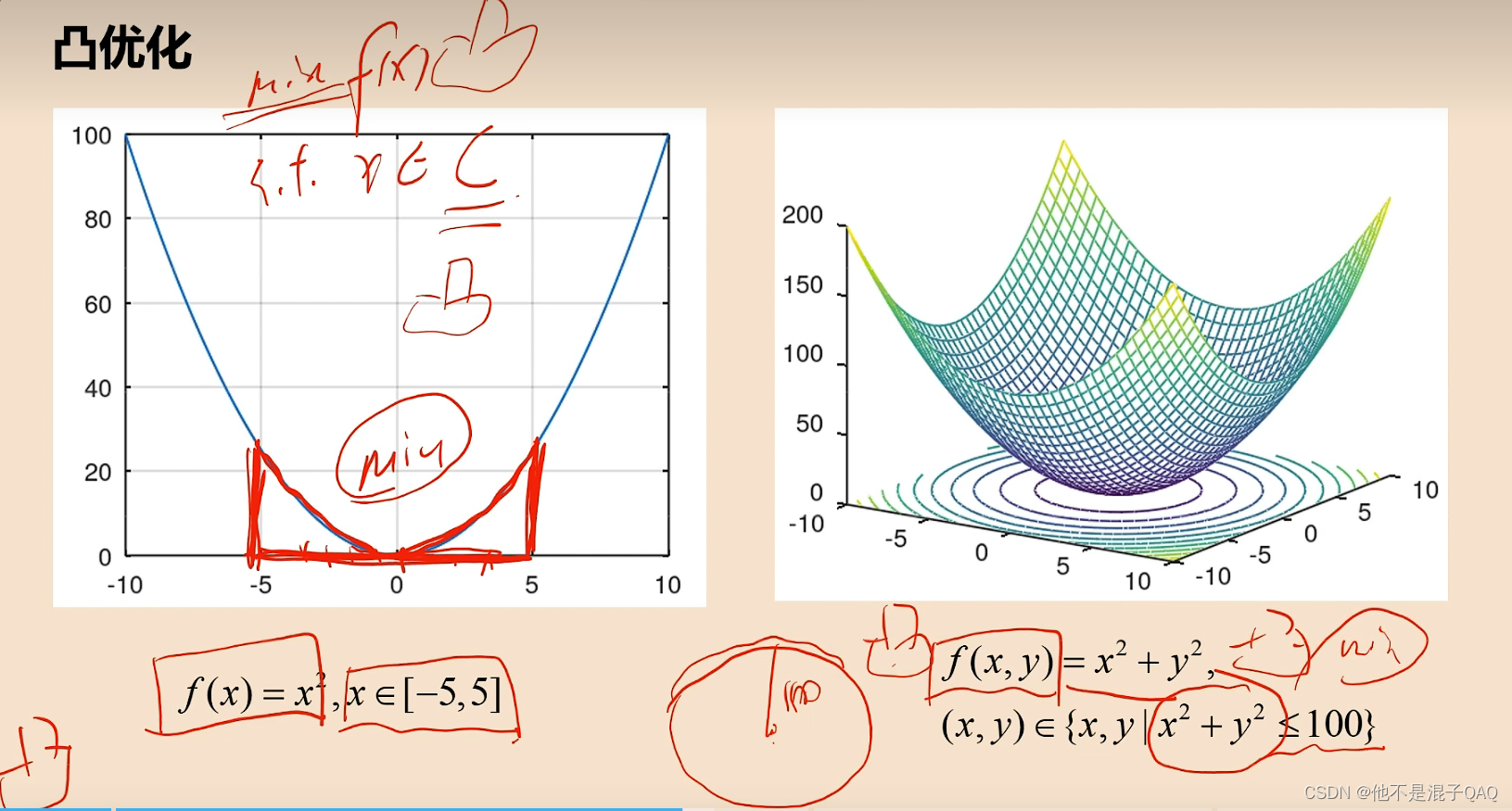
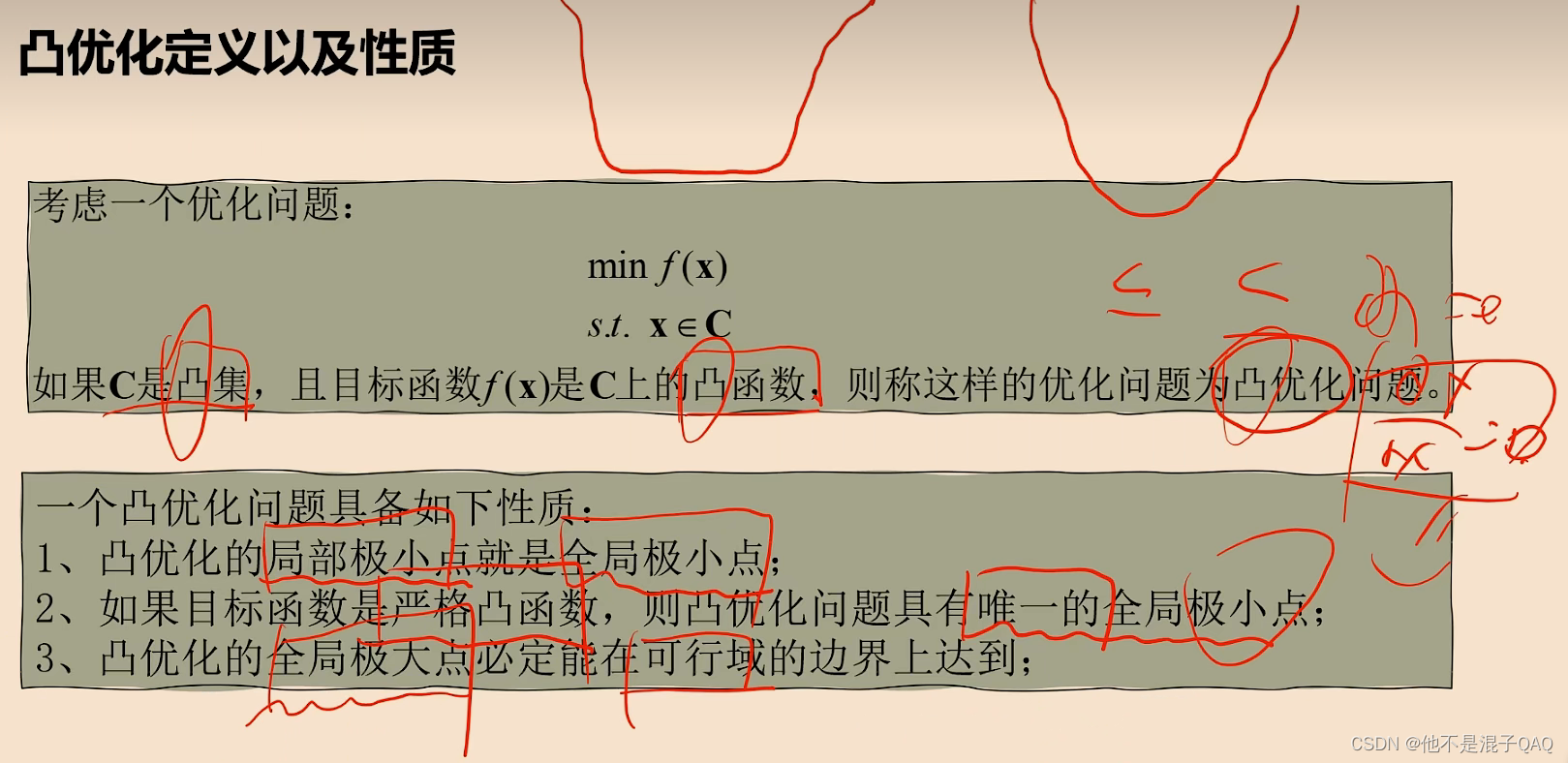
 凸优化
凸优化
在定义域和F(X)都是凸集的问题(凸凸问题),就是凸优化
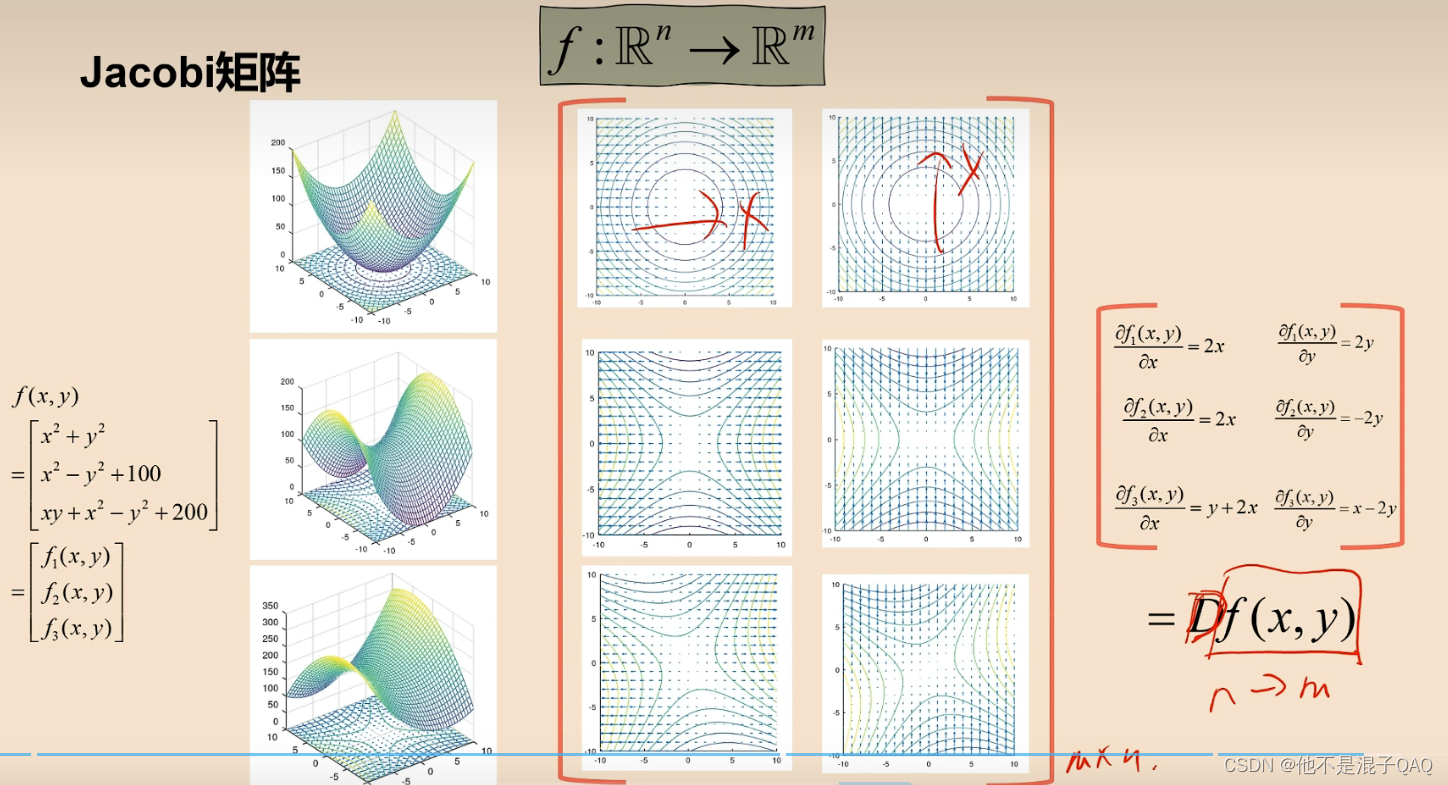 jacobi 广义导数 n维映射到m维
jacobi 广义导数 n维映射到m维
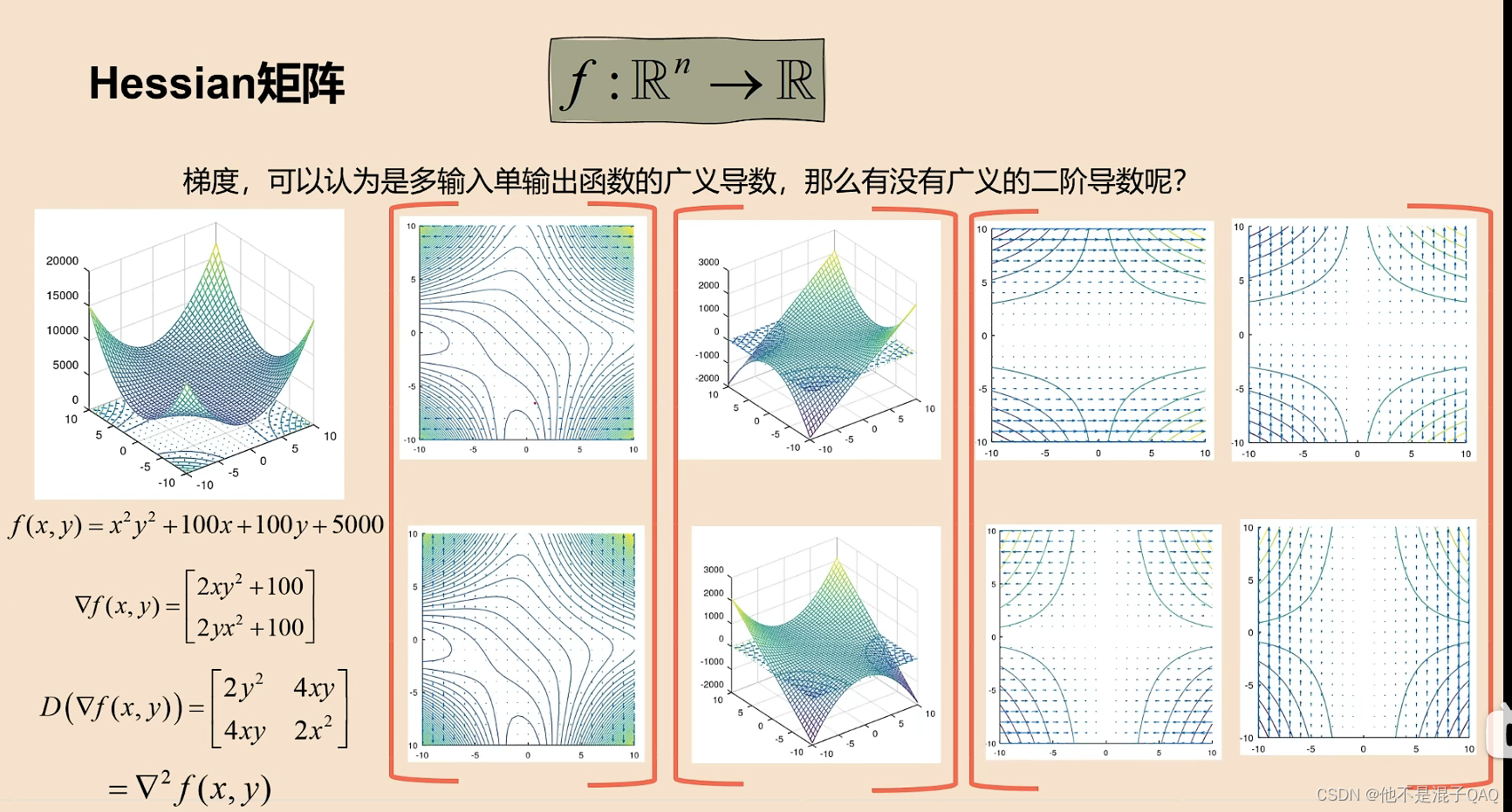 梯度的雅可比矩阵就是海森矩阵
梯度的雅可比矩阵就是海森矩阵
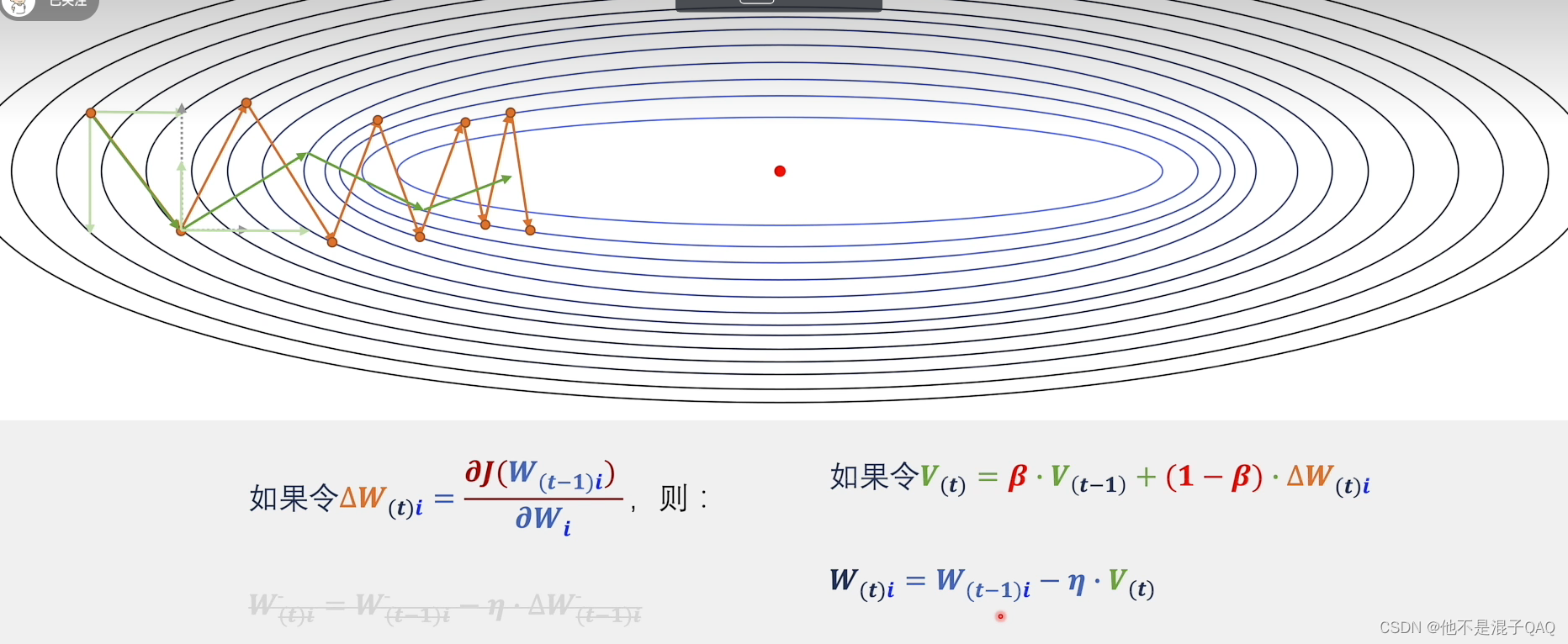
动量法(Momentum)是一种常用的梯度下降优化算法,通过引入动量概念来加速收敛速度和提高稳定性。在传统的梯度下降算法中,每次更新参数时都是直接根据当前的梯度进行更新,而动量法则考虑了之前的更新历史,使得参数更新更具有惯性。
动量法的核心思想是在更新参数时,根据当前的梯度和之前累积的速度(动量),计算出新的速度,并利用新的速度来更新参数。其计算方式如下:
v(t) = β * v(t-1) + (1 - β) * ∇J(w)
w(t) = w(t-1) - α * v(t)
其中,v(t)表示当前时刻的速度,w(t)表示当前时刻的参数,∇J(w)表示当前时刻的梯度,α为学习率(步长),β为动量系数,控制了之前速度的权重。
动量法的关键在于动量系数的选择。动量系数越大,之前速度对当前速度的影响就越大,可以增加算法在平坦区域的探索能力,减少震荡;动量系数越小,算法则更加稳定,适合处理局部极小值点。
动量法的优点是可以加速收敛速度、提高稳定性,并且在处理具有大量平坦区域的目标函数时特别有效。它广泛应用于深度学习和神经网络的训练过程中,能够加速模型的收敛,提高训练效率。
牛顿法
牛顿法(Newton's Method),是一种用于求解方程的迭代数值方法。它通过使用函数的一阶和二阶导数信息,以迭代的方式逼近方程的根。
牛顿法的基本原理如下:
初始化:选择一个初始近似解 x₀。
迭代过程:
- 计算当前近似解 xₙ 的函数值 f(xₙ) 和一阶导数值 f'(xₙ)。
- 如果 f'(xₙ) ≈ 0,则终止迭代,xₙ 可能是方程的驻点。
- 更新近似解:xₙ₊₁ = xₙ - f(xₙ) / f'(xₙ)。
判断条件:
- 若 |xₙ₊₁ - xₙ| < ε,其中 ε 为预先设定的精度要求,迭代收敛,结束迭代过程。
- 否则,重复步骤 2,直到满足终止条件。
牛顿法利用了函数的局部线性近似来寻找方程根,通过不断迭代更新近似解,使得近似解逐渐接近真实的根。相比于区间消去法,牛顿法在附近具有较好的收敛速度,尤其适用于平坦区域较小的光滑函数。
牛顿法在求解非线性方程、优化问题以及曲线拟合等领域广泛应用。然而,牛顿法也有一些局限性,如对于初始近似解的选择敏感,可能出现迭代发散或跳过根的情况。此外,在某些情况下,牛顿法可能会陷入局部最小值或不稳定的状态。
为了克服牛顿法的局限性,人们发展了许多改进的变体方法,如拟牛顿法(Quasi-Newton Methods)和加权牛顿法(Weighted Newton Methods),以提高算法的稳定性和收敛性。
牛顿法得知道一阶导、二阶导。简直天上掉馅饼,而插值法使用导数的定义代替牛顿法中二阶导。










