前言
SLAM是现阶段很多研究生的研究方向,我也是作为一个即将步入视觉SLAM的研究生,网上对于SLAM的介绍很多,但很少有人完整系统的告诉你学习视觉SLAM该有那些基础,那么此贴将告诉你学习SLAM你要有那些方面的基础。
1.经典视觉SLAM的框架
学习经典视觉SLAM的框架对于学习SLAM(Simultaneous Localization and
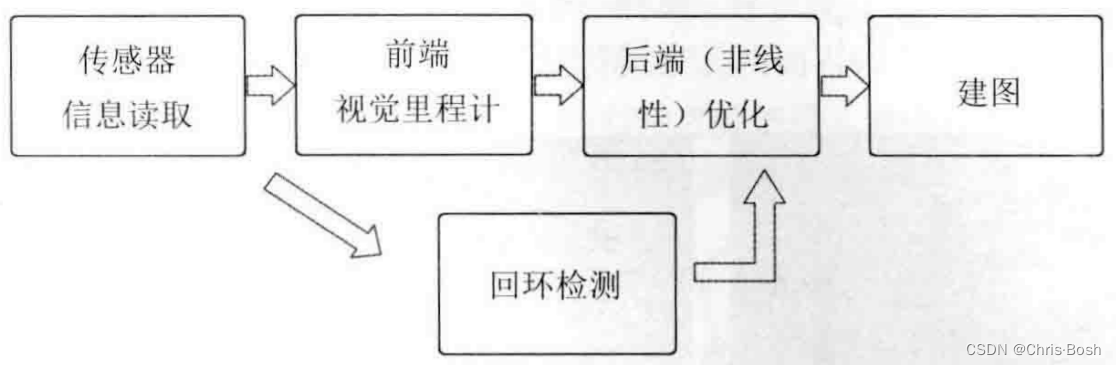
Mapping,同时定位与地图构建)是非常重要的。以下是一些原因:1.理解基本概念:经典视觉SLAM框架提供了一个结构化的方法来组织SLAM的各个组成部分。它涵盖了SLAM中的基本概念和关键步骤,如传感器数据输入、地图的构建、定位和回环检测等。通过学习这个框架,可以更好地理解和掌握SLAM的基本概念。
2.知道工作流程:了解经典视觉SLAM框架可以帮助我们了解SLAM系统的整体工作流程。它提供了一个框架来描述SLAM系统中各个模块之间的关系和数据流动。对于初学者来说,这种框架可以帮助理清思路,使学习和开发SLAM系统更加有条理。
3.研究和实践的基础:经典视觉SLAM框架是众多研究和实践工作的基础。许多SLAM算法和技术都是在这个框架的基础上发展和实现的。因此,学习经典视觉SLAM框架可以为进一步深入研究和实践提供坚实的基础。
4.掌握关键技术:经典视觉SLAM框架涵盖了许多关键的SLAM技术,如特征提取与匹配、视觉里程计、前端与后端优化、回环检测等。学习这个框架可以帮助我们掌握这些关键技术,从而更好地理解SLAM算法的原理和实现细节。
总之,学习经典视觉SLAM的框架对于理解SLAM的基本概念、掌握SLAM系统的工作流程、为进一步研究和实践奠定基础以及掌握关键技术都是至关重要的。它可以帮助我们建立一个清晰的SLAM思维框架,并为我们在SLAM领域的学习和发展提供支持。
2.高等数学、线性代数、概率论、矩阵论
学习高等数学、线性代数、概率论和矩阵论对于视觉SLAM有以下帮助:
1.高等数学:高等数学是数学的重要分支,它包括微积分、数学分析等内容。在视觉SLAM中,高等数学的知识可以用于理解和应用各类数学方法和技巧,如优化算法、积分和微分方程等。例如,在视觉SLAM中的优化问题中,需要使用数学优化方法,如最小二乘法、非线性优化等。
2.线性代数:线性代数是研究向量空间和线性映射的数学分支。在视觉SLAM中,线性代数的知识非常重要,因为它涉及到相机投影模型、坐标变换、位姿估计等。例如,在相机标定和位姿估计中,需要使用矩阵运算、线性方程组求解等线性代数的知识。
3.概率论:概率论是研究随机现象和不确定性的数学分支。在视觉SLAM中,概率论的知识用于建模和处理感知和运动的不确定性。例如,图像特征匹配、滤波器和粒子滤波等都是基于概率论的方法。
4.矩阵论:矩阵论是研究矩阵和线性方程组的数学分支。在视觉SLAM中,矩阵论的知识用于处理和解决相关的线性方程组、特征值求解、正交变换等问题。例如,矩阵表示相机的内外参数,通过矩阵运算可以进行相机的标定和位姿计算。
总的来说,学习高等数学、线性代数、概率论和矩阵论可以提供视觉SLAM所需的数学基础,帮助理解和应用SLAM算法的原理和方法。这些数学知识能够帮助我们分析和推导SLAM问题的数学模型,并构建相应的求解方法。它们为进一步深入研究和开发视觉SLAM提供了坚实的基础。
3.C++语法基础
学习C++语法基础对于视觉SLAM有以下帮助:
1.编写SLAM算法:C++是广泛使用的编程语言之一,它提供了丰富的编程工具和库,适用于开发复杂的SLAM算法。学习C++语法基础可以使你能够编写和理解SLAM算法的实现代码,包括数据结构、函数、类和模板等。
2.与相关工具和库的集成:在视觉SLAM的实际开发中,通常需要与其他库和工具进行集成,如OpenGL、OpenCV、PCL等。这些库通常是用C++编写的,所以了解C++语法可以更好地理解和使用这些库,实现与它们的交互和集成。
3.优化和性能:视觉SLAM算法通常需要处理大量的图像数据和实时传感器数据。学习C++语法基础可以帮助你编写高效的代码,并优化算法以提高性能。你可以使用C++的各种特性,如指针、引用、内存管理等,来有效地处理和操作数据,以及优化算法的执行时间和内存占用。
4.开源SLAM框架和工具:许多开源的视觉SLAM框架和工具,如ORB-SLAM、LSD-SLAM、GTSAM等,都是用C++编写的。学习C++语法基础可以帮助你理解和使用这些框架和工具的源代码,进行二次开发和扩展。
5.算法实现和调试:学习C++语法基础可以让你更好地理解算法的实现细节,以及进行调试和错误排查。你可以使用C++的调试工具和技术来跟踪代码执行过程、打印变量值和调试信息,帮助你理解和解决算法中的问题。
总之,学习C++语法基础对于视觉SLAM有很大的帮助。它使你能够编写和理解SLAM算法的实现代码,与相关工具和库进行集成,优化算法性能,使用开源框架和工具,以及进行算法实现和调试。通过掌握C++语法基础,你可以更好地开发和应用视觉SLAM算法。
4.Linux基础及Ubuntu操作系统
学习Linux基础及Ubuntu操作系统可以对视觉SLAM有以下帮助:
1.开源环境:Ubuntu是一种常用的开源操作系统,拥有丰富的资源和社区支持。Linux基础知识和Ubuntu操作系统的学习可以使得对视觉SLAM开源工具、算法和库的使用更加顺利。
2.配置和安装:学习Linux基础知识可以帮助理解和配置Ubuntu操作系统。在进行视觉SLAM研究或开发时,需要安装和配置许多依赖项、库和工具,掌握Linux基础知识可以更好地进行相关操作和调试。
3.多线程优化:视觉SLAM通常需要进行大量的图像和传感器数据处理,对计算能力要求较高。Linux基础知识可以帮助理解和优化多线程编程,从而提高性能。
4.基本命令行工具:Linux操作系统提供了丰富的命令行工具,可以帮助进行文件管理、软件安装、编译构建等操作。这些工具在视觉SLAM开发中经常用到。
5.软件包管理:Ubuntu操作系统使用apt包管理器能够方便地安装、更新和管理软件包。学习Linux基础及Ubuntu操作系统可以提高对软件包的理解和使用。
6.跨平台支持:Linux操作系统在嵌入式系统、无人机、机器人等领域得到广泛应用。学习Linux基础知识可以使得在不同平台上的视觉SLAM开发更加顺利。
总之,学习Linux基础及Ubuntu操作系统可以提高对视觉SLAM开发环境的理解和掌握,方便相关工具和算法的使用和调试,进而提高视觉SLAM研究和开发的效率。
5.Vim文本编辑器
学习Vim文本编辑器可以对视觉SLAM有以下帮助:
1.快速编辑和查找:Vim通过快捷键和命令使得编辑和查找文本变得更加高效。在视觉SLAM的开发中,经常需要编辑配置文件、代码文件等,Vim可以提供快速的编辑和查找功能,帮助开发者更有效地修改和调试代码。
2.多文件编辑和管理:视觉SLAM项目通常包含多个文件,比如源代码、配置文件、数据文件等。Vim提供了多文件编辑和管理的功能,可以轻松在多个文件之间切换,方便查看和修改不同文件的内容。
3.自定义配置:Vim具有高度可定制性,用户可以根据自己的需求进行个性化设置和配置。在视觉SLAM开发中,可以根据项目需求设置Vim的编辑环境,使其更加适合自己的工作流程。
4.插件支持:Vim拥有丰富的插件系统,可以扩展其功能。在视觉SLAM领域,可能需要使用一些特定的插件来进行代码补全、语法高亮、调试等。学习Vim可以让开发者更好地了解和使用这些插件,提高开发效率。
5.跨平台使用:Vim可以在各种操作系统上运行,包括Unix、Linux、Windows等。视觉SLAM开发往往涉及到不同平台的开发和调试,学习Vim可以使得在不同平台上的代码编辑更加统一和便捷。
虽然学习Vim需要一定的时间和精力投入,但它可以提高对文本编辑的效率和掌控力,从而加速视觉SLAM项目的开发和调试过程。
6.Gitee/GitHub
视觉SLAM领域的大佬高翔老师把《视觉SLAM十四讲》中所有的代码都托管到了GitHub上。我们是要下载学习的。
链接如下:
https://github.com/gaoxiang12/slambook2
总结
我是一个即将步入视觉SLAM的研究生,向往可以在CSDN遇到更多这方面的大佬能够给予直到。也希望遇到更多一起步入视觉SLAM的学习者一起讨论。希望我们都能慢慢在视觉SLAM领域取得进步。










