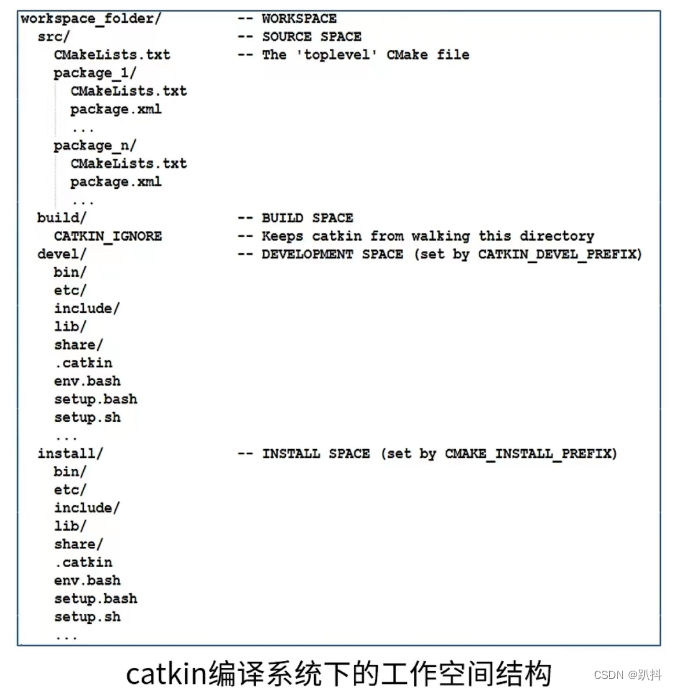
工作空间文件结构
工作空间(workspace)是一个存放工程开发相关文件的文件夹,类似于在windows中使用IDE创建的工程。主要分为以下四个文件夹:
- src: 代码空间(Source Space):用于放置功能包,包括代码和配置文件
- build: 编译空间(Build Space):用于放置在编译过程中产生的中间文件
- devel: 开发空间(Development Space):用于放置编译生成的一些可执行文件、库和脚本
- install: 安装空间(Install Space)
创建工作空间流程
创建工作空间
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
步骤如下:
1.在主文件夹打开终端
$ mkdir catkin_ws
2.在主文件夹下创建catkin_ws文件夹
$ cd catkin_ws/
3.在catkin_ws文件夹中创建src文件夹,用于放置功能包和源码
$ mkdir src
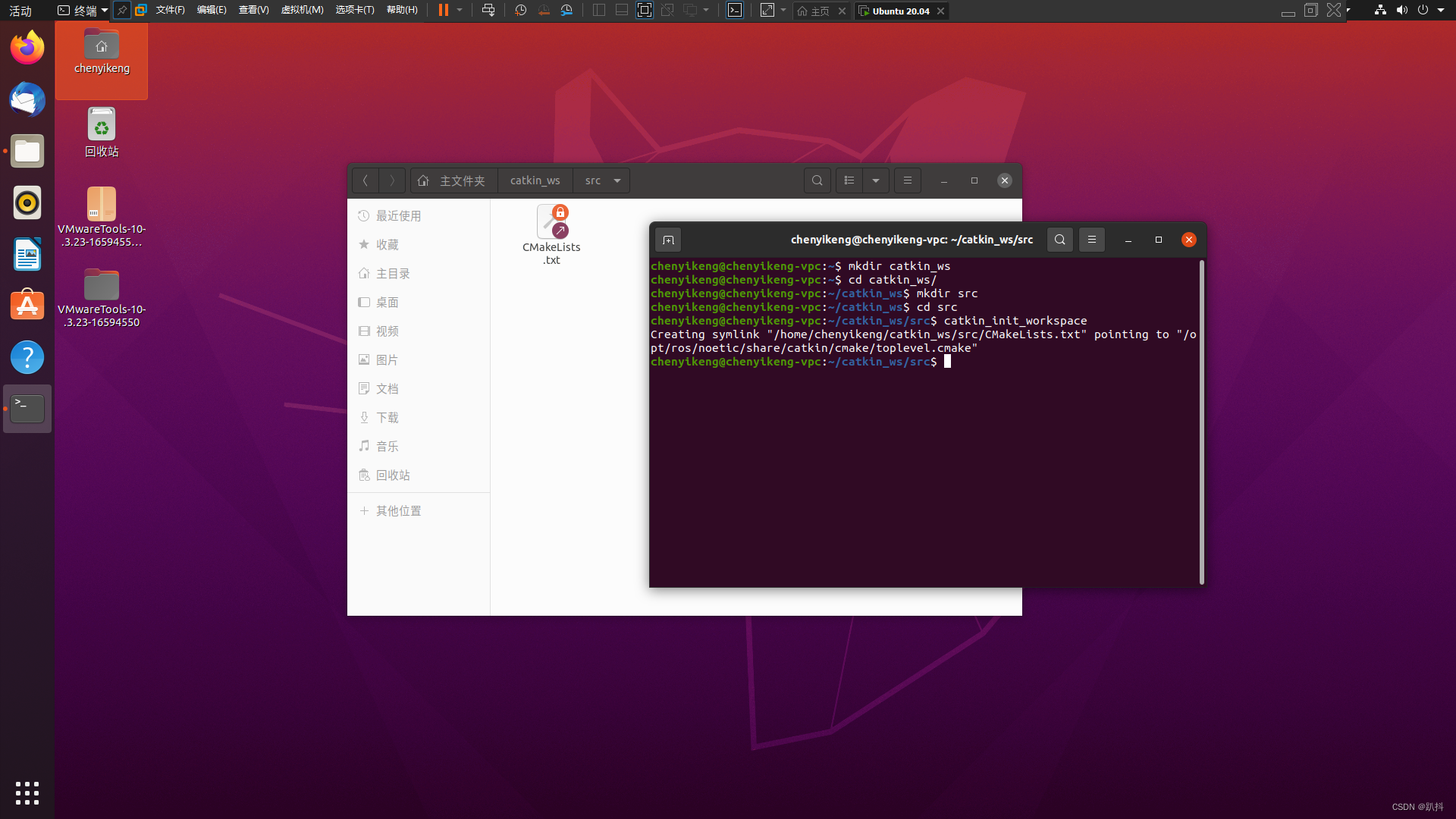
4.在src文件夹中初始化当前文件夹,将其属性变成ros workspace。可以看到src中产生了一个txt文件,说明当前路径是一个ros的工作空间了。
$ cd src
$ catkin_init_workspace
编译工作空间
$ cd ~/catkin_ws/
$ catkin_make
步骤如下:
1.切换到工作空间的根目录
$ cd..
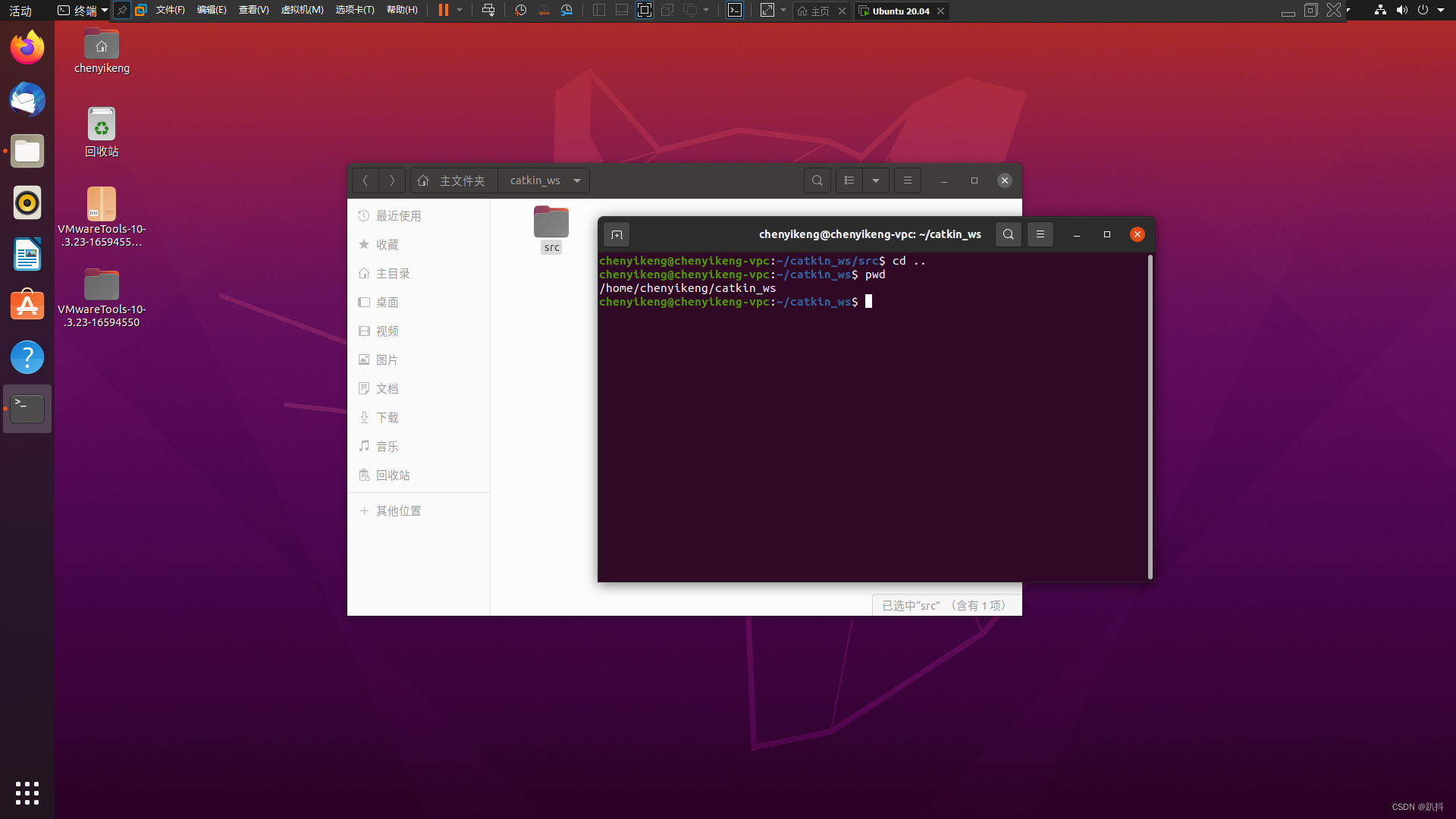
2.输入编译命令
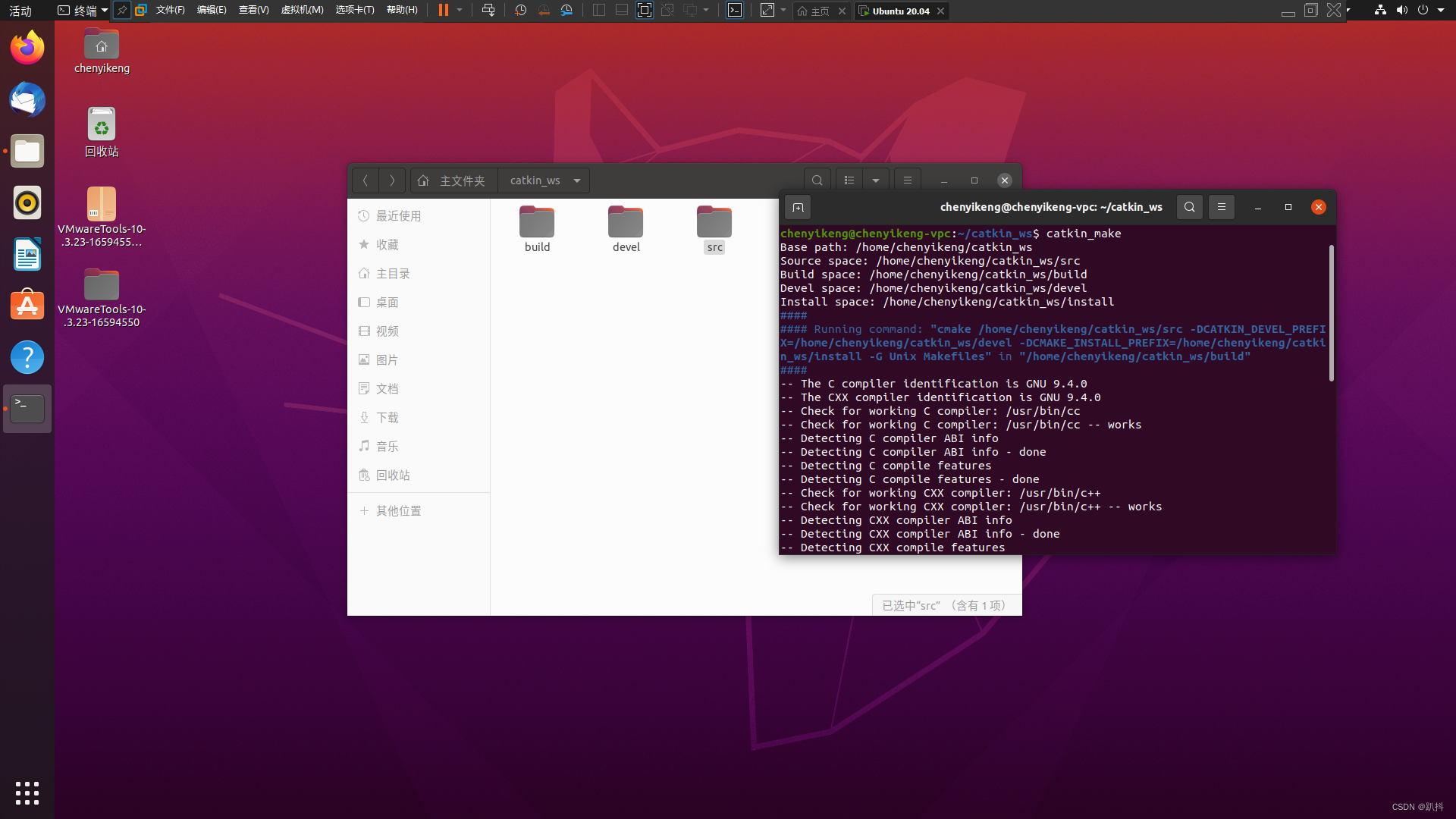
$ catkin_make
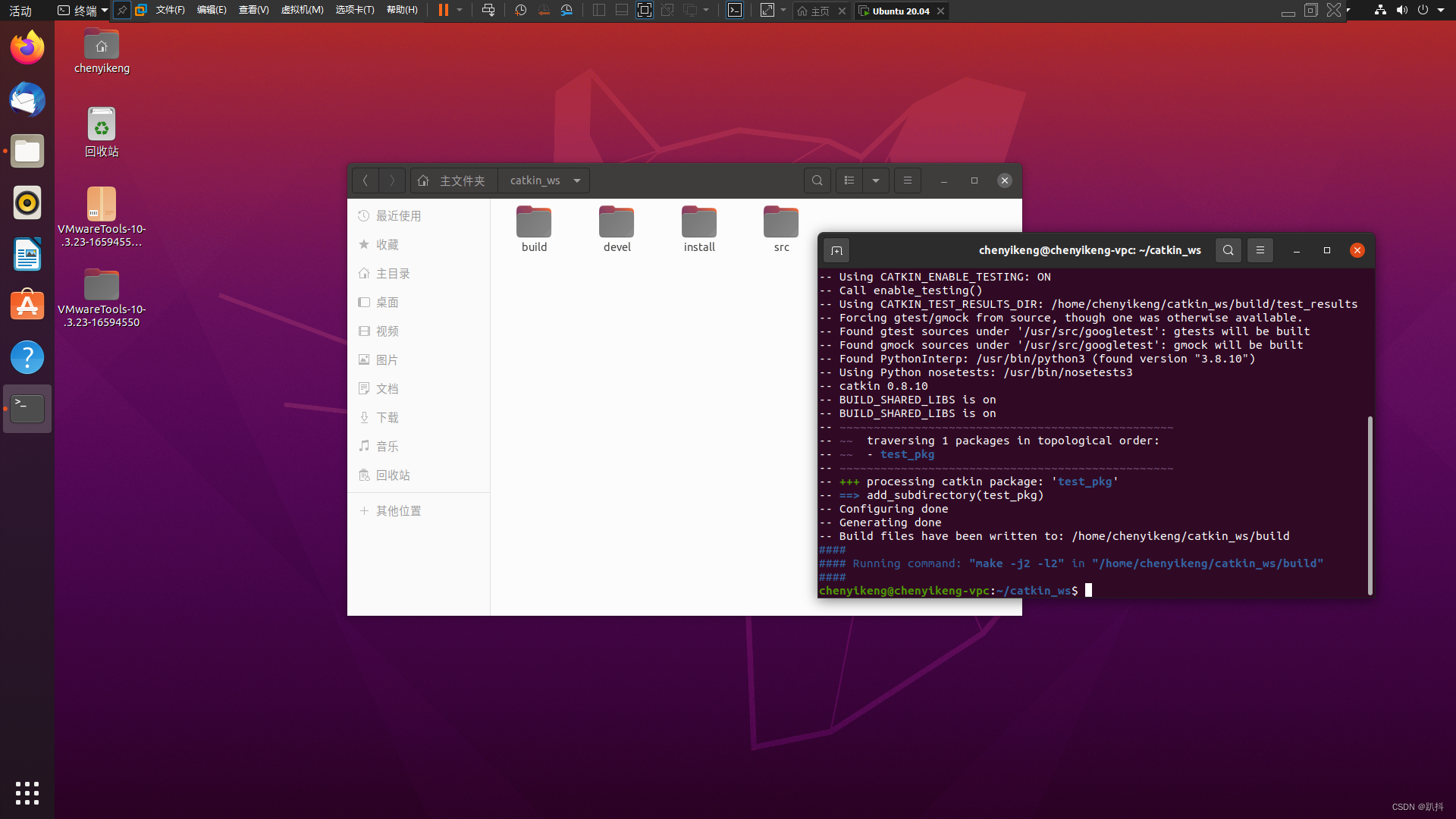
这个命令是ROS中catkin这个编译工具所提供的编译器指令。通过该指令可以编译src下面所有功能包的源码,然后根据配置来编译。其结果会放在devel和install中。可以由下图看出,在执行编译之后,出现了devel(开发空间)和build(编译空间)两个文件夹。但是并没有出现install这个文件夹,同时从日志中也可发现并无代码相关的记录,说明并没有进行真正的编译。
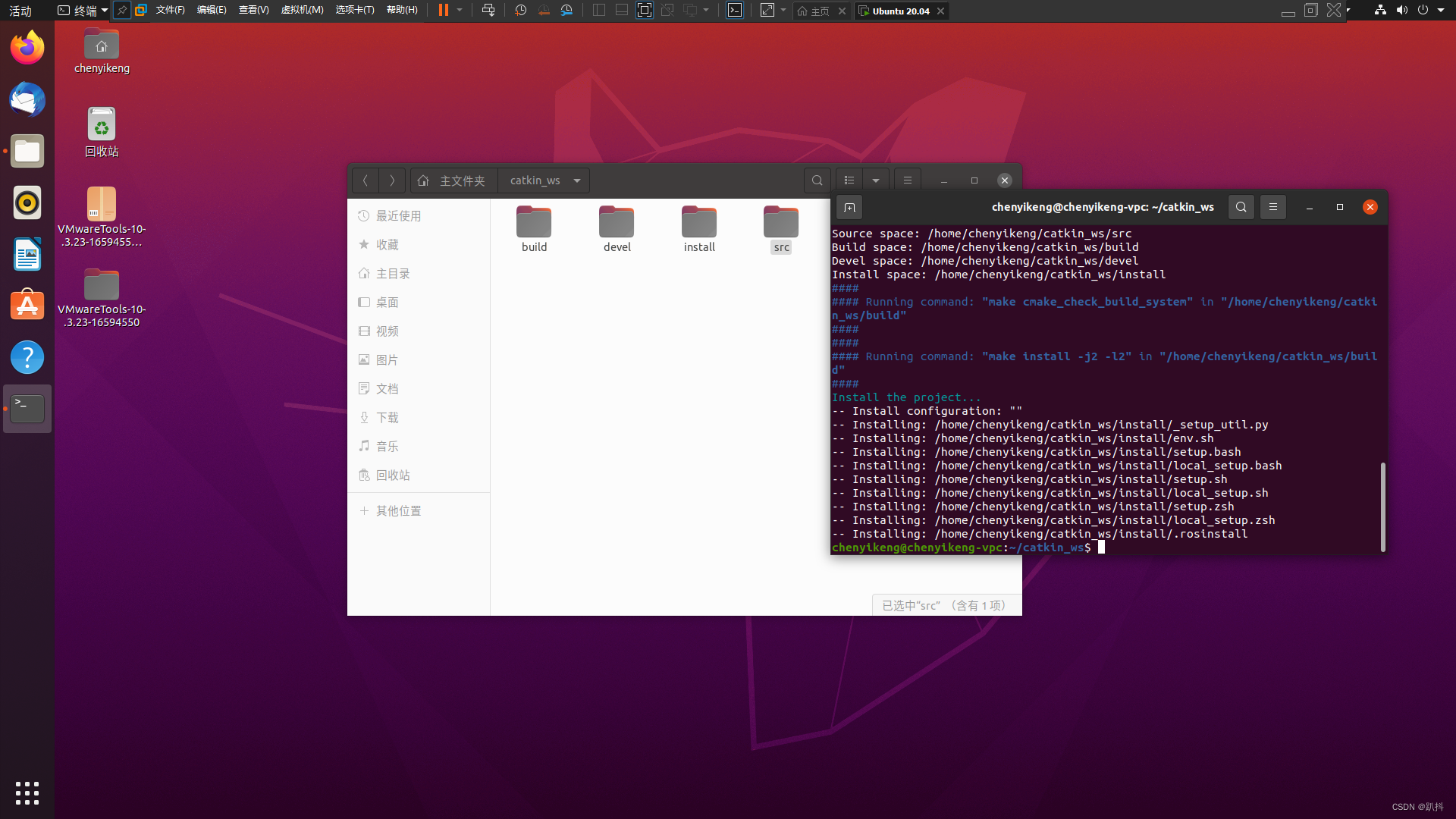
3.因此还需要完成最后一步:
$ catkin_make install
此时生成了install的文件夹,里面会放置最终编译生成的可执行文件。
设置环境变量/创建功能包
在创建代码的时候一定要创建一个功能包。功能包是放置ROS源码中的最小单元,即所有源码全部都必须放到功能包里面,不可直接放在src下去编译。创建功能包指令如下:
$ catkin_create_pkg <package_name> [depend1][depend2][depend3]
package_name: 功能包的名字
depend: 依赖,可以依赖其他的功能包
创建功能包
$ cd src/
$ catkin_create_pkg test_pkg roscpp rospy std_msgs
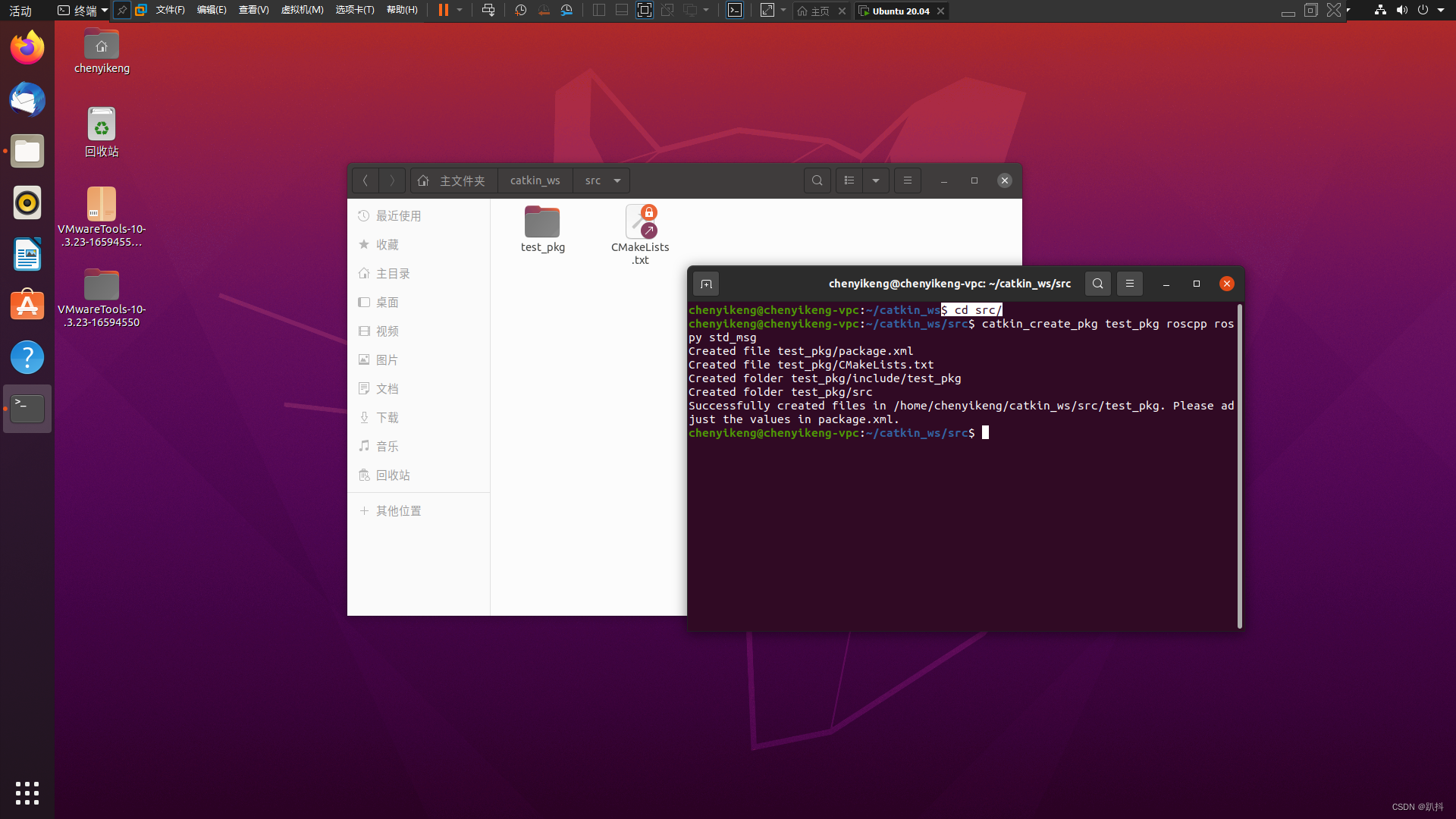
可以看到src中已经创建了一个test_pkg的功能包。
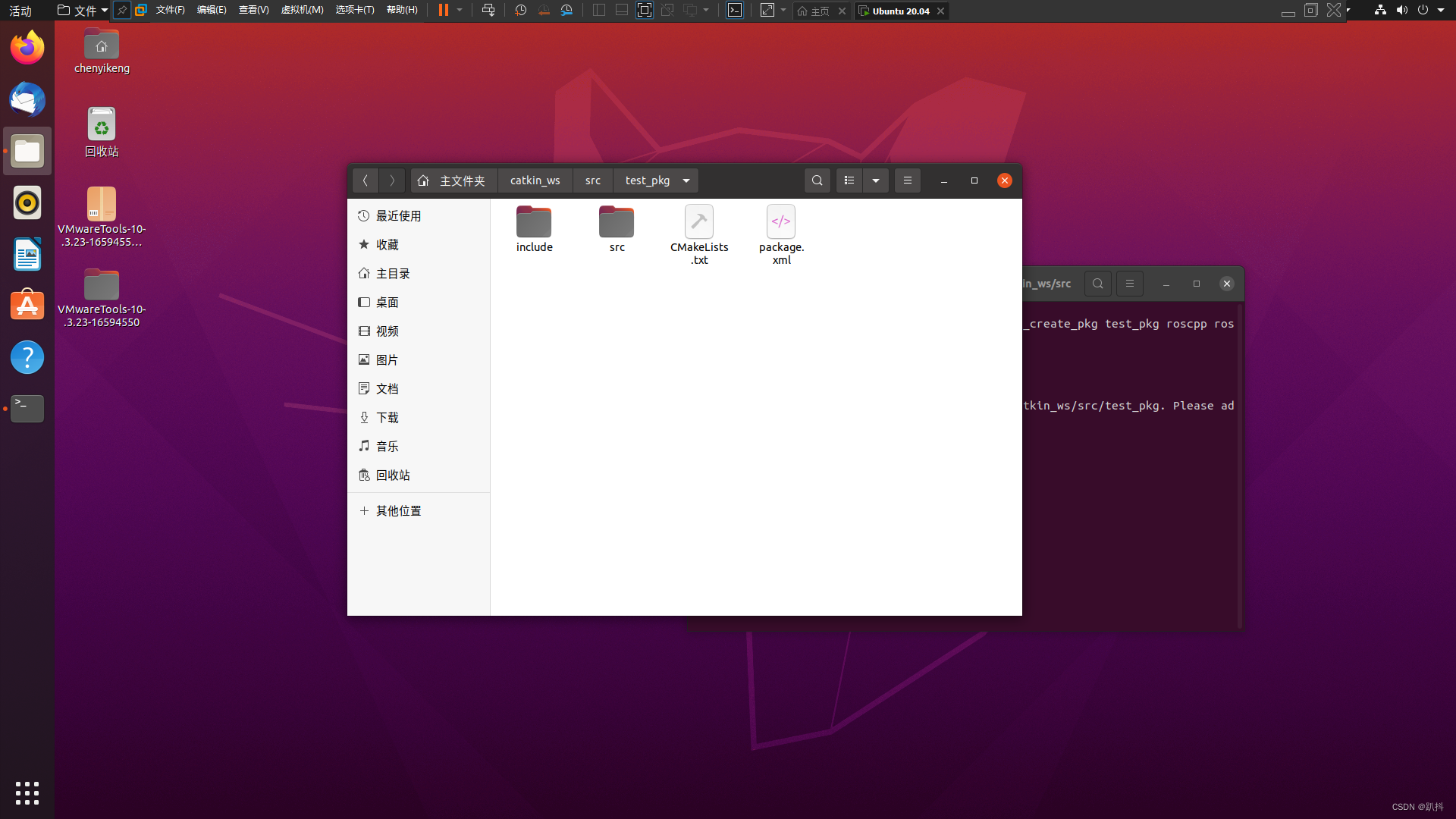
打开之后会发现里面有这样一系列文件和文件夹。其中src用于放置功能包的代码,例如cpp文件、py文件。include用于放置头文件。剩余的CMakeLists和package文件是每个功能包都必须要存在的两个文件
,标志着这个文件夹是功能包的属性。
注意: 在同一个工作空间下,不允许存在同名功能包;不同工作空间下,允许存在同名功能包。
编译功能包
$ cd ..
$ catkin_make
如果想要运行功能包中的某一个程序的话,需要先设置一下工作空间的环境变量
$ source devel/setup.bash
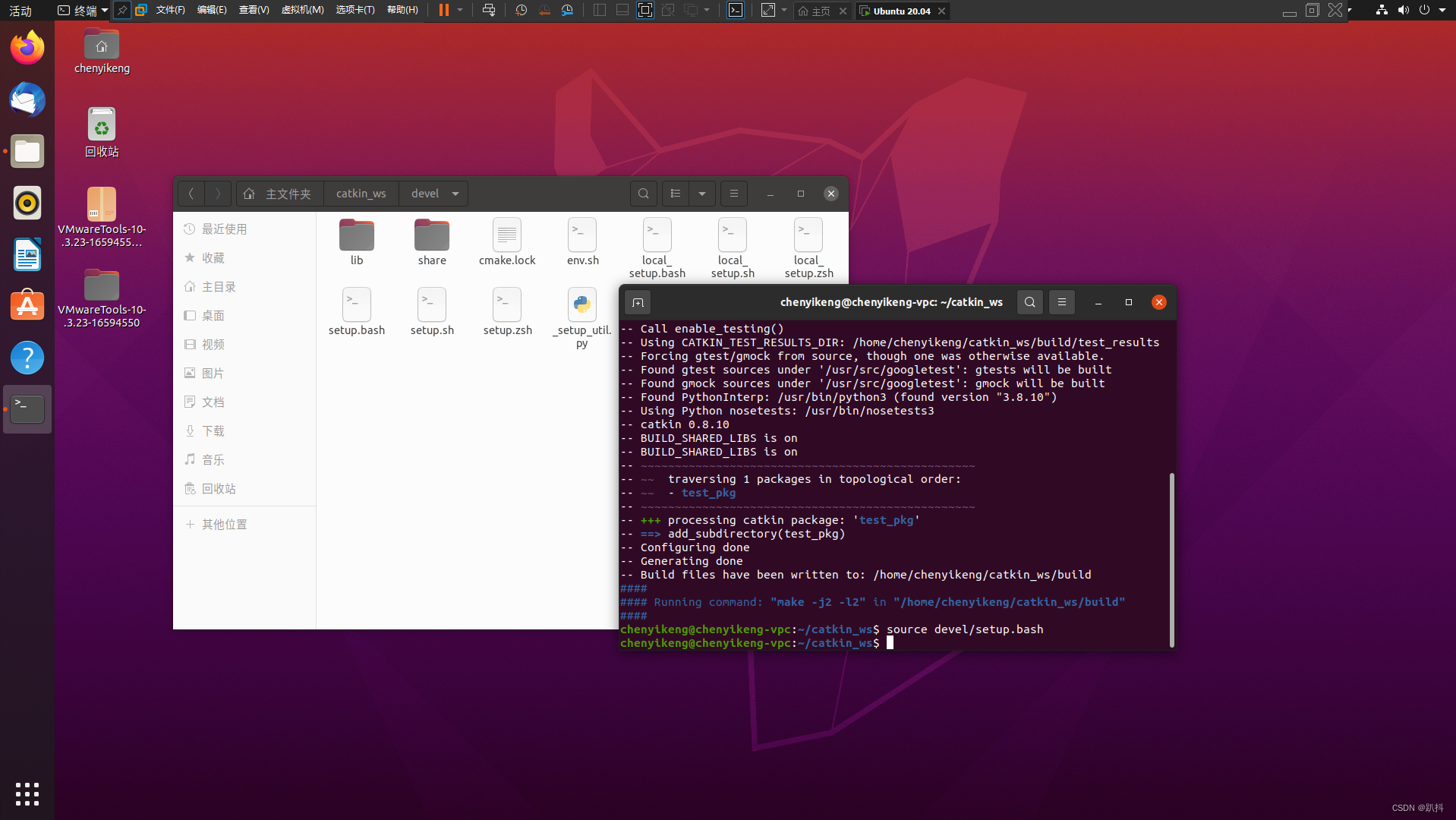
这个文件是针对catkin_ws工作空间的一个环境变量设置。只有设置这个环境变量之后,才能让系统找到这个工作空间,以及对应的功能包。
检查环境变量
$ echo $ROS_PACKAGE_PATH
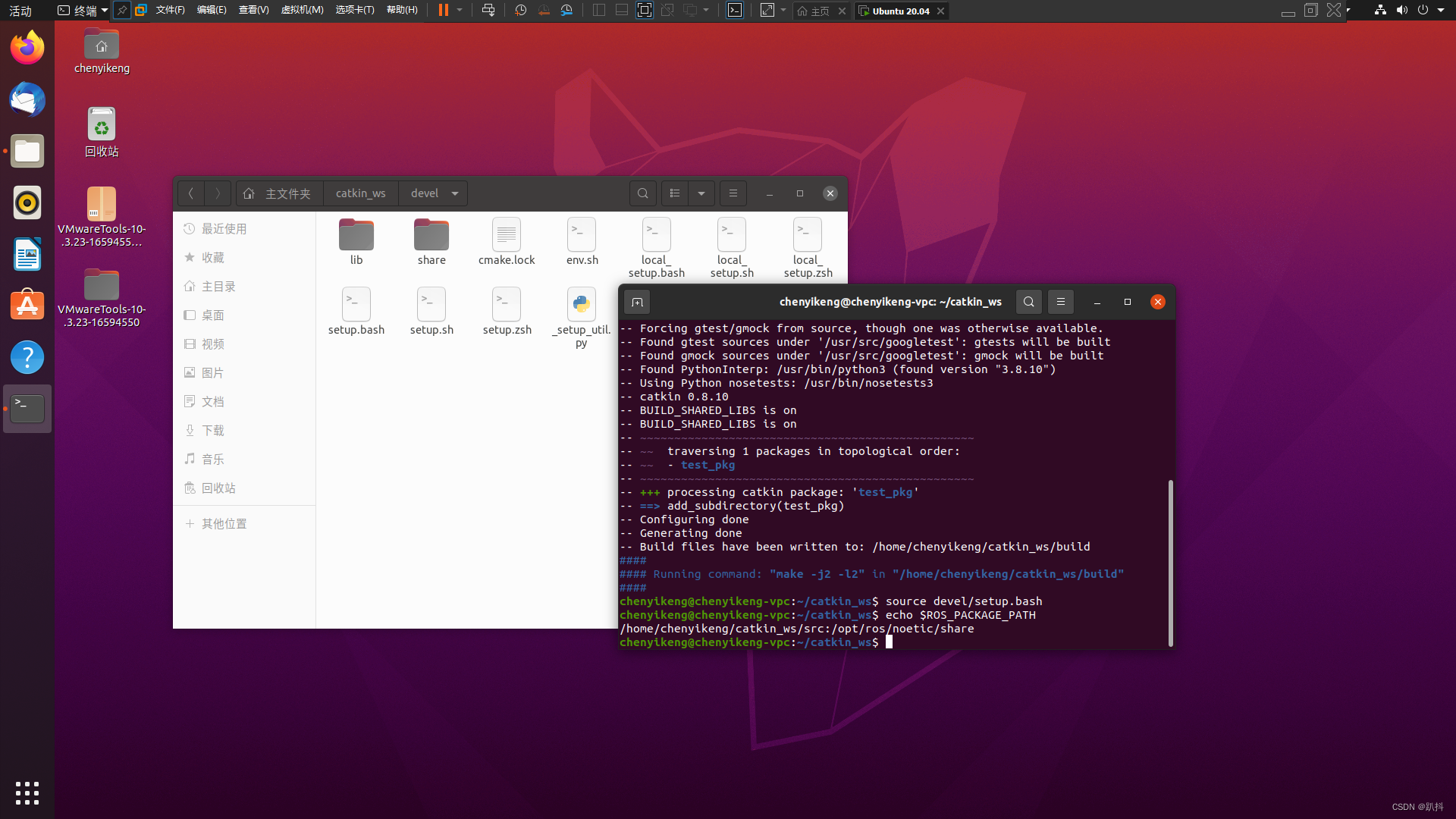
ROS_PACKAGE_PATH是ROS本身的环境变量,它会通过这个环境变量来查找所有ROS功能包的路径。所以只有设置这个工作空间的setup.bash之后,PATH里头才会包含该工作空间的路径。









